逆運動学を使用した 2 次元パスのトレース
はじめに
この例では、inverseKinematicsクラスを使用して単純な 2 次元マニピュレーターの逆運動学を計算する方法を示します。マニピュレーター ロボットは、回転ジョイントをもつ単純な 2 自由度の平面マニピュレーターで、剛体をrigidBodyTreeオブジェクトに組み立てて作成されています。円形の軌跡が 2 次元平面に作成され、逆運動学ソルバーに点として渡されます。ソルバーは必要なジョイント位置を計算してこの軌跡を得ます。最後に、ロボットがアニメーション化されて、円形の軌跡を達成するロボット コンフィギュレーションが示されます。
ロボットの構築
rigidBodyTree オブジェクトと剛体を、関連付けられたジョイントと共に作成します。各剛体の幾何学的特性を指定し、ロボットに追加します。
空の剛体ツリー モデルで始めます。
robot = rigidBodyTree('DataFormat','column','MaxNumBodies',3);
ロボット アームのアーム長さを指定します。
L1 = 0.3; L2 = 0.3;
ツール座標系の X 軸に沿ったツール ヒントのオフセットの長さを指定します。
h = 0.05;
'joint1' ジョイントをもつ 'link1' ボディを追加します。
body = rigidBody('link1'); joint = rigidBodyJoint('joint1', 'revolute'); setFixedTransform(joint,trvec2tform([0 0 0])); joint.JointAxis = [0 0 1]; body.Joint = joint; addBody(robot, body, 'base');
'joint2' ジョイントをもつ 'link2' ボディを追加します。
body = rigidBody('link2'); joint = rigidBodyJoint('joint2','revolute'); setFixedTransform(joint, trvec2tform([L1,0,0])); joint.JointAxis = [0 0 1]; body.Joint = joint; addBody(robot, body, 'link1');
固定ジョイント 'fix1' をもつエンドエフェクタ 'tool' を追加します。
body = rigidBody('tool'); joint = rigidBodyJoint('fix1','fixed'); setFixedTransform(joint, trvec2tform([L2, 0, 0])); body.Joint = joint;
ツール ヒントを表すための新しい基準座標系を定義します。
body.addFrame('toolTip','tool',trvec2tform([h,0,0]));
'tool' 剛体の 'toolTip' 座標系のビジュアルを追加します。
exampleHelperAddFrameVisual(body,"toolTip") addBody(robot, body, 'link2');
ロボットの詳細を表示して、入力プロパティを検証します。ロボットには、リンク ボディが回転ジョイントを介して親ボディに接続されている 2 つの非固定ジョイントが存在する必要があり、エンドエフェクタは固定ジョイントを介して親ボディに接続されています。
showdetails(robot)
-------------------- Robot: (3 bodies) Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 link1 joint1 revolute base(0) link2(2) 2 link2 joint2 revolute link1(1) tool(3) 3 tool fix1 fixed link2(2) --------------------
軌跡の定義
10 秒間にわたってトレースされる円を定義します。この円は、半径 0.15 で "xy" 平面にあります。
t = (0:0.2:10)'; % Time
count = length(t);
center = [0.3 0.1 0];
radius = 0.15;
theta = t*(2*pi/t(end));
points = center + radius*[cos(theta) sin(theta) zeros(size(theta))];逆運動学の解
inverseKinematics オブジェクトを使用して、軌跡に沿って指定されたエンドエフェクタ位置を達成するロボット コンフィギュレーションの解を求めます。
コンフィギュレーションの解を行列 qs として事前に割り当てます。
q0 = homeConfiguration(robot); ndof = length(q0); qs = zeros(count, ndof);
逆運動学ソルバーを作成します。このワークフローのエンドエフェクタ姿勢における唯一の重要な係数は xy 直交座標の点であるため、weight ベクトルの第 4 要素と第 5 要素にはゼロでない重みを指定します。その他すべての要素はゼロに設定します。
ik = inverseKinematics('RigidBodyTree', robot); weights = [0, 0, 0, 1, 1, 0]; endEffector = 'toolTip';
点の軌跡をループして円をトレースします。それぞれの点に対して ik オブジェクトを呼び出して、エンドエフェクタ位置を達成するジョイント コンフィギュレーションを生成します。後で使用するためにコンフィギュレーションを保存します。
qInitial = q0; % Use home configuration as the initial guess for i = 1:count % Solve for the configuration satisfying the desired end effector % position point = points(i,:); qSol = ik(endEffector,trvec2tform(point),weights,qInitial); % Store the configuration qs(i,:) = qSol; % Start from prior solution qInitial = qSol; end
解のアニメーション化
この特定のロボット コンフィギュレーションを使用して、解の各座標系についてロボットをプロットします。また、目的の軌跡をプロットします。
軌跡の最初のコンフィギュレーションにロボットを表示します。プロットを調整して、円が描画されている 2 次元平面を表示します。目的の軌跡をプロットします。
figure show(robot,qs(1,:)'); view(2) ax = gca; ax.Projection = 'orthographic'; hold on plot(points(:,1),points(:,2)) axis([-0.1 0.7 -0.3 0.5 -0.2 0.2])
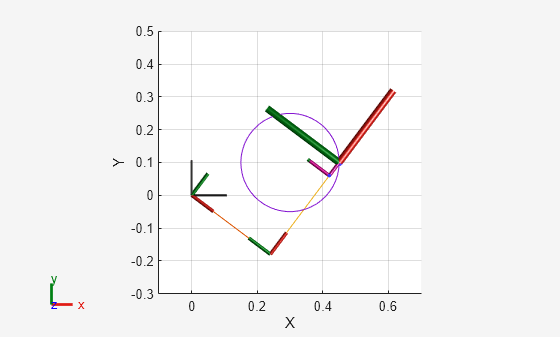
ロボットの軌跡を 1 秒あたり 15 フレームの固定レートで表示するように、rateControlオブジェクトを設定します。逆運動学ソルバーから、各コンフィギュレーションのロボットを表示します。表示された軌跡をアームがトレースする様子を観察します。
framesPerSecond = 15; r = rateControl(framesPerSecond); for i = 1:count show(robot,qs(i,:)','PreservePlot',false); drawnow waitfor(r); end

参考
rigidBodyTree | rigidBody | rigidBodyJoint | inverseKinematics