replaceBody
ロボットのボディを置き換え
説明
例
ダイナミクス関数を使用してジョイント トルクとジョイント加速度を計算するには、rigidBodyTreeオブジェクトとrigidBodyにダイナミクス プロパティを指定します。
剛体ツリー モデルを作成します。接続する 2 つの剛体を作成します。
robot = rigidBodyTree('DataFormat','row'); body1 = rigidBody('body1'); body2 = rigidBody('body2');
ボディに接続するジョイントを指定します。body2 から body1 への固定変換を設定します。変換は x 方向に 1 m です。
joint1 = rigidBodyJoint('joint1','revolute'); joint2 = rigidBodyJoint('joint2'); setFixedTransform(joint2,trvec2tform([1 0 0])) body1.Joint = joint1; body2.Joint = joint2;
2 つのボディのダイナミクス プロパティを指定します。ボディをロボット モデルに追加します。この例では、ロッド (body1) と、接続された球体 (body2) の基本値が与えられています。
body1.Mass = 2; body1.CenterOfMass = [0.5 0 0]; body1.Inertia = [0.001 0.67 0.67 0 0 0]; body2.Mass = 1; body2.CenterOfMass = [0 0 0]; body2.Inertia = 0.0001*[4 4 4 0 0 0]; addBody(robot,body1,'base'); addBody(robot,body2,'body1');
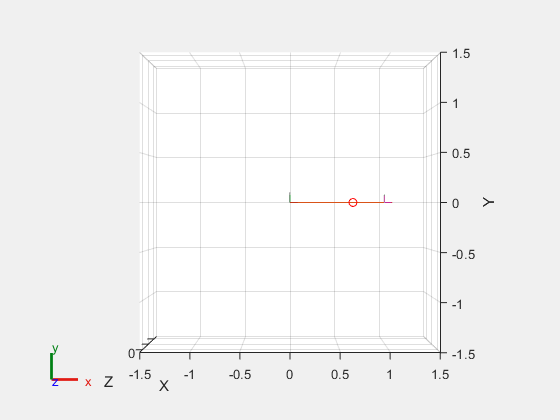
ロボット全体の重心位置を計算します。位置をロボットにプロットします。ビューを xy 平面に移動します。
comPos = centerOfMass(robot); show(robot); hold on plot(comPos(1),comPos(2),'or') view(2)
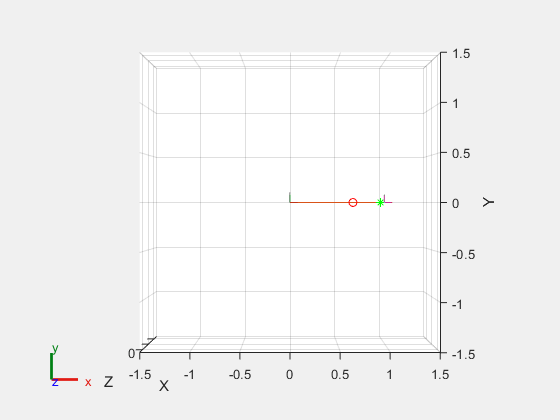
2 番目のボディの質量を変更します。重心の変化に注目してください。
body2.Mass = 20; replaceBody(robot,'body2',body2) comPos2 = centerOfMass(robot); plot(comPos2(1),comPos2(2),'*g') hold off
入力引数
拡張機能
バージョン履歴
R2016b で導入
参考
rigidBodyJoint | rigidBody | replaceJoint | addBody | removeBody