このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
createGridWorld
強化学習用の 2 次元グリッド ワールドの作成
説明
例
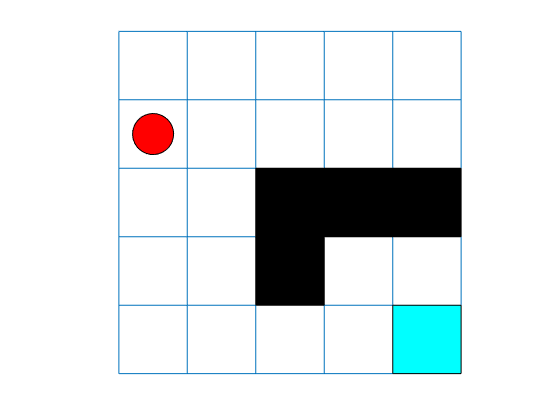
この例では、以下のルールをもつ 5 行 5 列のグリッド ワールドについて考えます。
境界線で囲まれた 5 行 5 列のグリッド ワールド。4 つのアクション (北 = 1、南 = 2、東 = 3、西 = 4) が可能。
エージェントはセル [2,1] (2 行目の 1 列目) から開始する。
セル [5,5] (青) の終了状態に到達すると、エージェントは報酬 +10 を受け取る。
環境には、セル [2,4] からセル [4,4] への、+5 の報酬を伴う特別なジャンプが含まれる。
エージェントは、セル [3,3]、[3,4]、[3,5]、および [4,3] (黒いセル) の障害物によってブロックされる。
他のすべてのアクションは報酬が -1 される。

まず、関数 createGridWorld を使用して GridWorld オブジェクトを作成します。
GW = createGridWorld(5,5)
GW =
GridWorld with properties:
GridSize: [5 5]
CurrentState: "[1,1]"
States: [25x1 string]
Actions: [4x1 string]
T: [25x25x4 double]
R: [25x25x4 double]
ObstacleStates: [0x1 string]
TerminalStates: [0x1 string]
ProbabilityTolerance: 8.8818e-16
次に、初期状態、終了状態、および障害物の状態を設定します。
GW.CurrentState = '[2,1]'; GW.TerminalStates = '[5,5]'; GW.ObstacleStates = ["[3,3]";"[3,4]";"[3,5]";"[4,3]"];
障害物の状態に関する状態遷移行列を更新し、障害物の状態を飛び越えるジャンプ ルールを設定します。
updateStateTranstionForObstacles(GW) GW.T(state2idx(GW,"[2,4]"),:,:) = 0; GW.T(state2idx(GW,"[2,4]"),state2idx(GW,"[4,4]"),:) = 1;
次に、報酬遷移行列で報酬を定義します。
nS = numel(GW.States); nA = numel(GW.Actions); GW.R = -1*ones(nS,nS,nA); GW.R(state2idx(GW,"[2,4]"),state2idx(GW,"[4,4]"),:) = 5; GW.R(:,state2idx(GW,GW.TerminalStates),:) = 10;
次に、rlMDPEnv を使用し、GridWorld オブジェクト GW を使用してグリッド ワールド環境を作成します。
env = rlMDPEnv(GW)
env =
rlMDPEnv with properties:
Model: [1x1 rl.env.GridWorld]
ResetFcn: []
関数 plot を使用すると、グリッド ワールド環境を可視化できます。
plot(env)
入力引数
出力引数
バージョン履歴
R2019a で導入