バナナ関数の最小化
この例では、Rosenbrock の "バナナ関数" を最小化する方法を示します。
は、原点付近の曲率のため、バナナ関数と呼ばれます。この問題を解こうとするとほとんどの方法で収束が遅くなるため、最適化の例の中で悪名高いものとなっています。
には点 に一意な最小値があり、 です。この例では、点 を開始点として を最小化する方法をいくつか示します。
導関数を使用しない最適化
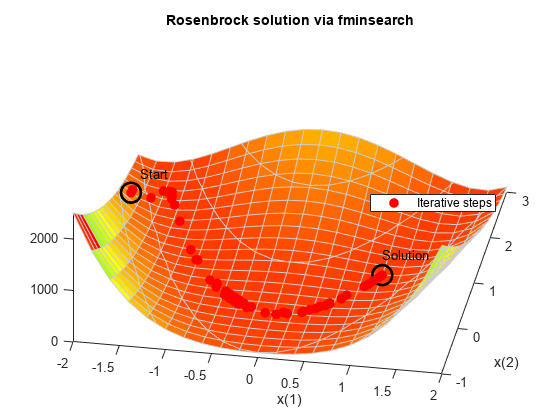
関数 fminsearch によって制約のない問題の最小値を見つけます。ここでは目的関数の導関数を推定しないアルゴリズムが使用されます。代わりに、幾何学的探索法が使用されます (fminsearch アルゴリズムを参照)。
fminsearch を使用してバナナ関数を最小化します。一連の反復をレポートする出力関数を含めます。
fun = @(x)(100*(x(2) - x(1)^2)^2 + (1 - x(1))^2); options = optimset(OutputFcn=@bananaout,Display="off"); x0 = [-1.9,2]; [x,fval,eflag,output] = fminsearch(fun,x0,options); title("Rosenbrock solution via fminsearch")
Fcount = output.funcCount;
disp("Number of function evaluations for fminsearch is " + string(Fcount))Number of function evaluations for fminsearch is 210
disp("Number of solver iterations for fminsearch is " + string(output.iterations))Number of solver iterations for fminsearch is 114
推定された導関数を使用した最適化
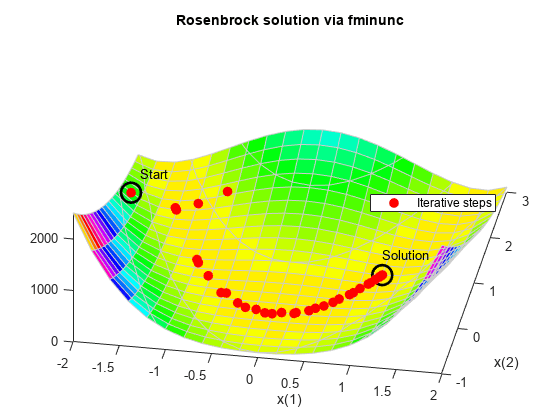
関数 fminunc によって制約のない問題の最小値を見つけます。ここでは導関数に基づくアルゴリズムが使用されます。このアルゴリズムは、目的関数の 1 次導関数だけでなく 2 次導関数の行列も推定しようと試みます。通常、fminunc は fminsearch よりも効率的です。
fminunc を使用してバナナ関数を最小化します。
options = optimoptions("fminunc",Display="off",... OutputFcn=@bananaout,Algorithm="quasi-newton"); [x,fval,eflag,output] = fminunc(fun,x0,options); title("Rosenbrock solution via fminunc")
Fcount = output.funcCount;
disp("Number of function evaluations for fminunc is " + string(Fcount))Number of function evaluations for fminunc is 150
disp("Number of solver iterations for fminunc is "+ string(output.iterations))Number of solver iterations for fminunc is 34
最急降下法を使用した最適化
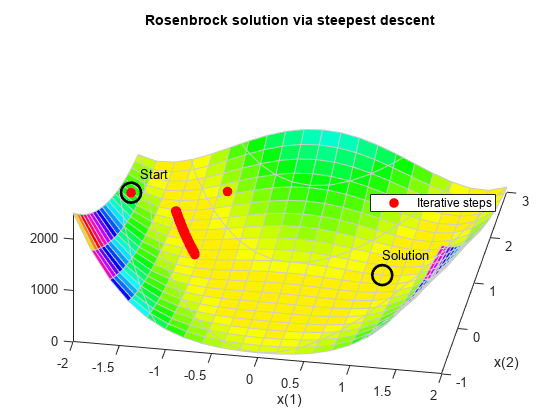
最急降下アルゴリズムを使用してバナナ関数を最小化しようとすると、問題の曲率が高いために解法プロセスが非常に遅くなります。
最急降下アルゴリズムを使用する fminunc を実行するには、"quasi-newton" アルゴリズムの HessUpdate 非表示オプションを値 "steepdesc" に設定します。ソルバーで解を求めるのに時間がかかるため、関数評価の最大回数を既定よりも大きな値に設定してください。この場合は、関数評価が 600 回実行された後でも解が求められません。
options = optimoptions(options,HessUpdate="steepdesc",... MaxFunctionEvaluations=600); [x,fval,eflag,output] = fminunc(fun,x0,options); title("Rosenbrock solution via steepest descent")
Fcount = output.funcCount; disp("Number of function evaluations for steepest descent is "... + string(Fcount))
Number of function evaluations for steepest descent is 600
disp("Number of solver iterations for steepest descent is "... + string(output.iterations))
Number of solver iterations for steepest descent is 45
解析勾配を使用した最適化
勾配を与えると、fminunc で最適化を解決する際に使用される関数評価が少なくなります。勾配を与える場合は、"quasi-newton" アルゴリズムに比べて高速になることが多く、メモリ使用量も少なくなる "trust-region" アルゴリズムを使用できます。HessUpdate オプションと MaxFunctionEvaluations オプションを既定値にリセットします。
grad = @(x)[-400*(x(2) - x(1)^2)*x(1) - 2*(1 - x(1));
200*(x(2) - x(1)^2)];
fungrad = @(x)deal(fun(x),grad(x));
options = resetoptions(options,{"HessUpdate","MaxFunctionEvaluations"});
options = optimoptions(options,SpecifyObjectiveGradient=true,...
Algorithm="trust-region");
[x,fval,eflag,output] = fminunc(fungrad,x0,options);
title("Rosenbrock solution via fminunc with gradient")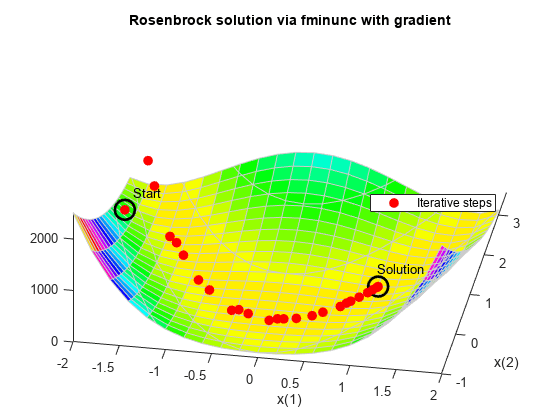
Fcount = output.funcCount; disp("Number of function evaluations for fminunc with gradient is "... + string(Fcount))
Number of function evaluations for fminunc with gradient is 32
disp("Number of solver iterations for fminunc with gradient is "... + string(output.iterations))
Number of solver iterations for fminunc with gradient is 31
解析的ヘッシアンを使用した最適化
ヘッシアン (2 次導関数の行列) を与えると、fminunc で最適化を解決する際に使用される関数評価をさらに少なくすることができます。この問題では、ヘッシアンを使用してもしなくても結果は同じです。
hess = @(x)[1200*x(1)^2 - 400*x(2) + 2, -400*x(1);
-400*x(1), 200];
fungradhess = @(x)deal(fun(x),grad(x),hess(x));
options.HessianFcn = "objective";
[x,fval,eflag,output] = fminunc(fungradhess,x0,options);
title("Rosenbrock solution via fminunc with Hessian")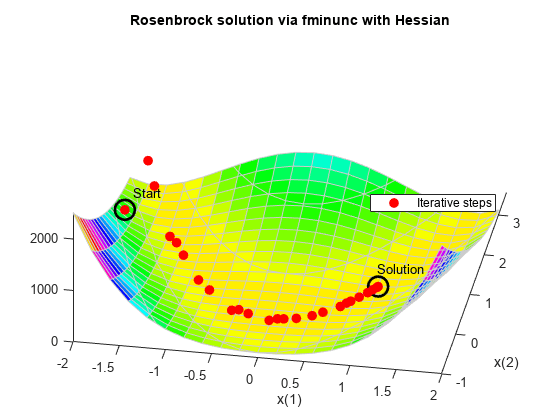
Fcount = output.funcCount; disp("Number of function evaluations for fminunc with gradient and Hessian is "... + string(Fcount))
Number of function evaluations for fminunc with gradient and Hessian is 32
disp("Number of solver iterations for fminunc with gradient and Hessian is " + string(output.iterations))Number of solver iterations for fminunc with gradient and Hessian is 31
最小二乗ソルバーを使用した最適化
非線形二乗和に推奨されるソルバーは、lsqnonlin です。このソルバーは、この特別なクラスの問題において勾配を使用しない fminunc よりもさらに効率的です。lsqnonlin を使用する場合は、目的関数を二乗和として記述しないでください。代わりに、lsqnonlin によって内部的に二乗和される基礎となるベクトルを記述してください。
options = optimoptions("lsqnonlin",Display="off",OutputFcn=@bananaout); vfun = @(x)[10*(x(2) - x(1)^2),1 - x(1)]; [x,resnorm,residual,eflag,output] = lsqnonlin(vfun,x0,[],[],options); title("Rosenbrock solution via lsqnonlin")

Fcount = output.funcCount; disp("Number of function evaluations for lsqnonlin is "... + string(Fcount))
Number of function evaluations for lsqnonlin is 87
disp("Number of solver iterations for lsqnonlin is " + string(output.iterations))Number of solver iterations for lsqnonlin is 28
最小二乗ソルバーおよびヤコビアンを使用した最適化
fminunc で勾配を使用して最小化する場合と同様に、lsqnonlin で導関数情報を使用すると、関数評価の回数を減らすことができます。非線形目的関数ベクトルのヤコビアンを与えて、最適化を再実行します。
jac = @(x)[-20*x(1),10;
-1,0];
vfunjac = @(x)deal(vfun(x),jac(x));
options.SpecifyObjectiveGradient = true;
[x,resnorm,residual,eflag,output] = lsqnonlin(vfunjac,x0,[],[],options);
title("Rosenbrock solution via lsqnonlin with Jacobian")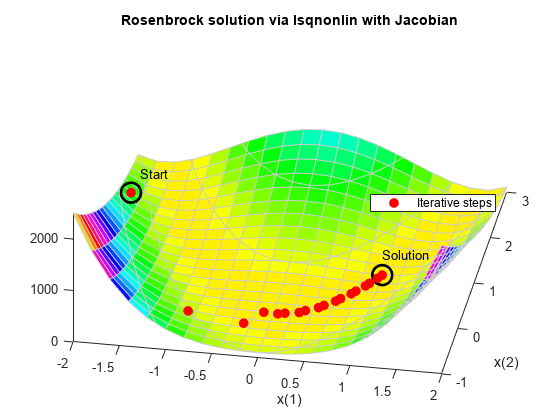
Fcount = output.funcCount; disp("Number of function evaluations for lsqnonlin with Jacobian is "... + string(Fcount))
Number of function evaluations for lsqnonlin with Jacobian is 29
disp("Number of solver iterations for lsqnonlin with Jacobian is "... + string(output.iterations))
Number of solver iterations for lsqnonlin with Jacobian is 28