tilt
説明
T = tilt(orientations)orientations に基づく傾斜角を返します。詳細については、傾斜角の定義を参照してください。
例
入力引数
出力引数
詳細
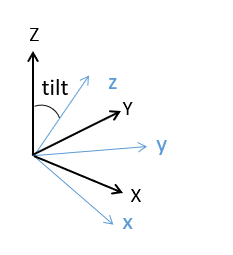
傾斜角は、基準座標系の正の Z 方向とボディ座標系の正の z 方向の間の角度と定義されます。orientations 入力で基準座標系からボディ座標系への回転座標変換が定義されます。
拡張機能
バージョン履歴
R2023b で導入
T = tilt(orientations)orientations に基づく傾斜角を返します。詳細については、傾斜角の定義を参照してください。
傾斜角は、基準座標系の正の Z 方向とボディ座標系の正の z 方向の間の角度と定義されます。orientations 入力で基準座標系からボディ座標系への回転座標変換が定義されます。
R2023b で導入