gravitydir
Description
D = gravitydir(orientations)orientations. By default, the reference frame of these orientations
is the north-east-down (NED) reference frame. See Gravity Direction for more details.
D = gravitydir(orientations,RF)"NED" (north-east-down) frame or the
"ENU" (east-north-up) frame.
Examples
Create an identity quaternion and get the corresponding gravity direction vector. Verify that the gravity direction vector is [0 0 1] as expected.
quat0 = ones(1,"quaternion");
dir1 = gravitydir(quat0)dir1 = 1×3
0 0 1
Next, create a quaternion that corresponds to an x-rotation of 90 degrees. Obtain the gravity direction vector.
angles = [0 0 90]; quat1 = quaternion(angles,"eulerd","ZYX","frame"); dir2 = gravitydir(quat1)
dir2 = 1×3
0 1.0000 0.0000
You can visually verify this result by using the poseplot function. From the figure, you can see that the gravitational acceleration is along the y-axis.
poseplot(quat1)

Change the reference frame to the east-north-up (ENU) frame and get the gravity direction vector.
dir3 = gravitydir(quat1,"ENU")dir3 = 1×3
0 -1.0000 -0.0000
Finally, create a vector of random quaternions and obtain the corresponding gravity direction vectors.
rng(2023) % For repeatable results
quats = randrot(10,1);
D = gravitydir(quats)D = 10×3
-0.2859 -0.8615 -0.4197
-0.7971 -0.3204 0.5119
0.3598 0.7139 -0.6007
0.3622 0.6720 0.6460
0.1749 0.4020 0.8988
0.4627 0.3655 -0.8077
0.3134 0.8613 0.4000
0.8776 0.4267 -0.2185
-0.9924 -0.1226 0.0137
0.4086 -0.4099 0.8155
Input Arguments
Output Arguments
More About
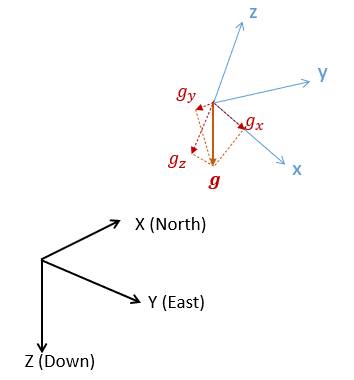
The gravitydir function returns the gravity
direction vector expressed in the body frame whose orientation is given by the
orientations input argument. For example, in the NED reference frame,
the orientation defines the rotational coordinate transformation from the NED frame (X-Y-Z)
to the body frame (x-y-z). The gravitydir function resolves the
gravity direction vector g into three
components gx,
gy, and
gz and returns these components.
Extended Capabilities
Version History
Introduced in R2023b
See Also
linaccel | compassAngle | tilt