pdepe
1 次元の放物型および楕円型 PDE の求解
構文
説明
sol = pdepe(m,pdefun,icfun,bcfun,xmesh,tspan)m は、問題の対称性 (スラブ、円柱または球面) を表します。求解する方程式は pdefun に、初期値は icfun に、境界条件は bcfun にそれぞれコード化されています。空間的に離散化して求める常微分方程式 (ODE) は、tspan に指定された各時点で、近似解を得るために積分されます。pdepe 関数は、xmesh で与えられるメッシュ上の解の値を返します。
[ は、(t,u(x,t)) の関数 (イベント関数) がゼロになる点も求めます。出力の sol,tsol,sole,te,ie] = pdepe(m,pdefun,icfun,bcfun,xmesh,tspan,options)te はイベント時点、sole はイベント時点における解、ie はトリガーされたイベントのインデックスです。tsol は、最初の終了イベントの前に tspan に指定された時間の列ベクトルです。
各イベント関数に対して、ゼロで積分を終了するかどうかと、ゼロクロッシングの方向を考慮するかどうかを指定します。これを行うには、@myEventFcn などの関数に odeset の Events オプションを設定し、対応する関数 [value,isterminal,direction] = myEventFcn(m,t,xmesh,umesh) を作成します。xmesh の入力は空間メッシュを含み、umesh はメッシュ点の解です。
例
pdepe を使用して熱方程式を円柱座標で解き、解をプロットします。
角対称性をもつ円柱座標では、熱方程式は次のようになります。
方程式は、時間 における について定義されます。初期条件は、ベッセル関数 とその最初のゼロ によって次のように定義されます。
この問題は円柱座標 (m = 1) にあるため、pdepe は で対称条件を自動的に適用します。右境界条件は次のようになります。
初期条件と境界条件は、次の問題の解析解と整合するように選択されます。
この方程式を MATLAB® で解くには、方程式、初期条件、境界条件をコード化し、適切な解のメッシュを選択してからソルバー pdepe を呼び出す必要があります。(ここで行ったように) 必要な関数をファイルの最後にローカル関数として含めることも、あるいは個別の名前付きファイルとして MATLAB パスのディレクトリに保存することもできます。
方程式のコード化
方程式は、コード化する前に pdepe ソルバーで想定される形式に書き換える必要があります。pdepe で想定される標準形式は次のとおりです。
この形式で記述すると、PDE は次のようになります。
適切な形式の方程式を使用すると、関連する項を読み取ることができます。
これで、方程式をコード化する関数を作成できるようになりました。この関数にはシグネチャ [c,f,s] = heatcyl(x,t,u,dudx) がなければなりません。
xは独立空間変数。tは独立時間変数。uは、xおよびtについて微分される従属変数。dudxは空間偏導関数 。出力
c、f、およびsは、pdepeで想定される標準 PDE 方程式形式の係数に対応。これらの係数は、入力変数x、t、u、およびdudxによってコード化されます。
結果として、この例の方程式は次の関数で表すことができます。
function [c,f,s] = heatcyl(x,t,u,dudx) c = 1; f = dudx; s = 0; end
(メモ: 関数はすべて例の最後にローカル関数として含まれます。)
初期条件のコード化
次に、初期条件を返す関数を記述します。初期条件は、最初の時間値 tspan(1) で適用されます。この関数にはシグネチャ u0 = heatic(x) がなければなりません。
の対応する関数は次のようになります。
function u0 = heatic(x) n = 2.404825557695773; u0 = besselj(0,n*x); end
境界条件のコード化
次に、境界条件を評価する関数を記述します。
この問題は円柱座標 (m = 1) にあるため、pdepe は で対称条件を自動的に適用します。したがって、左境界条件を指定する必要はありません。
区間 で提示される問題について、境界条件はすべての 、および または のいずれかに適用されます。ソルバーで想定される境界条件の標準形式は次のとおりです。
この形式で記述する場合、 の偏導関数の境界条件は流束 によって表す必要があります。そのため、この問題の右境界条件は次のようになります。
境界関数には関数シグネチャ [pl,ql,pr,qr] = heatbc(xl,ul,xr,ur,t) がなければなりません。
入力
xlおよびulは左境界の および に対応。入力
xrおよびurは右境界の および に対応。tは独立時間変数。出力
plおよびqlは左境界 (この問題では ) の および に対応。出力
prおよびqrは右境界 (この問題では ) の および に対応。
この例の境界条件は次の関数で表されます。
function [pl,ql,pr,qr] = heatbc(xl,ul,xr,ur,t) n = 2.404825557695773; pl = 0; %ignored by solver since m=1 ql = 0; %ignored by solver since m=1 pr = ur-besselj(0,n)*exp(-n^2*t); qr = 0; end
解のメッシュの選択
方程式を解く前に、メッシュ点 を、pdepe が解を評価する点として指定する必要があります。これらは、ベクトル t と x に設定します。ベクトル t と x は、ソルバーの中で異なる役割をもちます。特に求解のコストと精度は、ベクトル x の長さに強く依存します。しかし、ベクトル t の値にはあまり影響を受けません。
この問題では、x と t の両方の空間区間 [0,1] 内に等間隔に配置された 25 個の点をもつメッシュを使用します。
x = linspace(0,1,25); t = linspace(0,1,25);
方程式の求解
最後に、対称性 m、PDE 方程式、初期条件、境界条件、および x と t のメッシュを使用して方程式を解きます。
m = 1; sol = pdepe(m,@heatcyl,@heatic,@heatbc,x,t);
pdepe は 3 次元配列 sol に解を返します。ここで、sol(i,j,k) は t(i) と x(j) で評価した解の k 番目の要素 を近似します。u0 が各解要素の初期条件を指定するため、sol のサイズは length(t) x length(x) x length(u0) となります。この問題では u の要素は 1 つのみであるため、sol は 25 行 25 列の行列になりますが、通常はコマンド u = sol(:,:,k) を使用して k 番目の解要素を抽出できます。
最初の解要素を sol から抽出します。
u = sol(:,:,1);
解のプロット
解の表面プロットを作成します。この問題はディスク上の円柱座標で提示されているため、x の値は中心からの距離に応じたディスク上の温度を示し、t の値は特定の位置における温度の経時変化を示します。
surf(x,t,u) xlabel("x") ylabel("t") zlabel("u(x,t)") view([150 25])

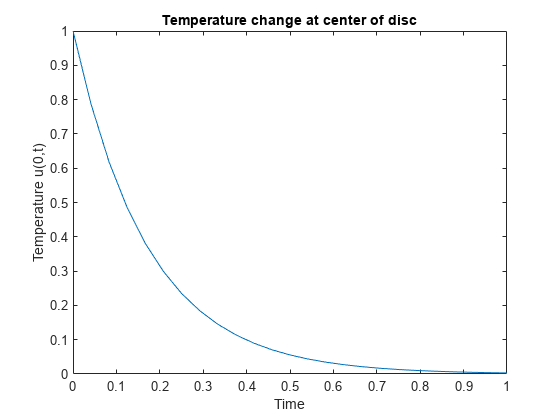
ディスクの中心 () の温度変化をプロットします。
plot(t,sol(:,1)) xlabel("Time") ylabel("Temperature u(0,t)") title("Temperature change at center of disc")
ローカル関数
ここでは、PDE ソルバー pdepe が解を計算するために呼び出すローカル補助関数を紹介しています。あるいは、これらの関数を独自のファイルとして MATLAB パスのディレクトリに保存することもできます。
function [c,f,s] = heatcyl(x,t,u,dudx) c = 1; f = dudx; s = 0; end %---------------------------------------------- function u0 = heatic(x) n = 2.404825557695773; u0 = besselj(0,n*x); end %---------------------------------------------- function [pl,ql,pr,qr] = heatbc(xl,ul,xr,ur,t) n = 2.404825557695773; pl = 0; %ignored by solver since m=1 ql = 0; %ignored by solver since m=1 pr = ur-besselj(0,n)*exp(-n^2*t); qr = 0; end %----------------------------------------------
偏微分方程式を解き、イベント関数を使用して振動解のゼロクロッシングをログに記録します。
次の方程式を考えます。
方程式は および に対して定義されます。初期条件は次のとおりです。
境界条件は次のとおりです。
さらに、解のゼロクロッシングにも注目します。
この問題を MATLAB で解くには、方程式、初期条件、境界条件、イベント関数をコード化し、ソルバー pdepe を呼び出す前に適切な解のメッシュを選択する必要があります。(ここで行ったように) 必要な関数をファイルの最後にローカル関数として含めることも、あるいは個別の名前付きファイルとして MATLAB パスのディレクトリに保存することもできます。
方程式のコード化
方程式は、コード化する前に pdepe ソルバーで想定される形式に書き換える必要があります。pdepe で想定される標準形式は次のとおりです。
PDE 方程式は既に次の形式になっています。
そのため、関連する次の項を読み取ることができます。
これで、方程式をコード化する関数を作成できるようになりました。この関数にはシグネチャ [c,f,s] = oscpde(x,t,u,dudx) がなければなりません。
xは独立空間変数。tは独立時間変数。uは、xおよびtについて微分される従属変数。dudxは空間偏導関数 。出力
c、f、およびsは、pdepeで想定される標準 PDE 方程式形式の係数に対応。これらの係数は、入力変数x、t、u、およびdudxによってコード化されます。
結果として、この例の方程式は次の関数で表すことができます。
function [c,f,s] = oscpde(x,t,u,dudx) c = 1/x; f = u/t; s = 0; end
(メモ: 関数はすべて例の最後にローカル関数として含まれます。)
初期条件のコード化
次に、初期条件を返す関数を記述します。初期条件は、最初の時間値 tspan(1) で適用されます。この関数にはシグネチャ u0 = oscic(x) がなければなりません。
の対応する関数は次のようになります。
function u0 = oscic(x) u0 = 1; end
境界条件のコード化
次に、境界条件を評価する関数を記述します。
区間 で提示される問題について、境界条件はすべての 、および または のいずれかに適用されます。ソルバーで想定される境界条件の標準形式は次のとおりです。
この形式で記述すると、この問題の境界条件は次のようになります。
境界関数には関数シグネチャ [pl,ql,pr,qr] = oscbc(xl,ul,xr,ur,t) がなければなりません。
入力
xlおよびulは左境界の および に対応。入力
xrおよびurは右境界の および に対応。tは独立時間変数。出力
plおよびqlは左境界 (この問題では ) の および に対応。出力
prおよびqrは右境界 (この問題では ) の および に対応。
この例の境界条件は次の関数で表されます。
function [pl,ql,pr,qr] = oscbc(xl,ul,xr,ur,t) pl = ul - 1; ql = 0; pr = ur - cos(pi*t); qr = 0; end
イベント関数のコード化
イベント関数を使用して、積分の解のゼロクロッシングをログに記録します。イベント関数には [value,isterminal,direction] = pdevents(m,t,xmesh,umesh) の関数シグネチャがあります。
mはpdepeの最初の入力として指定された座標の対称性。tは現在の時間 (スカラー)。xmeshは空間メッシュ。umeshにはメッシュ点での解が含まれる。valueは対象の方程式であり、通常は解umeshで表される。valueが 0 のときにイベントが発生します。isterminalは、イベントが積分を停止するかどうかを指定。isterminalが 0 の場合、イベントはログに記録されますが、積分は停止しません。isterminalが 1 の場合、積分はイベント発生時に停止します。directionはゼロクロッシングの方向を指定。1 の場合、正の傾きをもつゼロクロッシングのみがイベントをトリガーします。-1 の場合、ゼロクロッシングは負の傾きをもたなければなりません。0 の場合、すべてのゼロクロッシングがイベントをトリガーします。
積分の各時点で、ソルバーがイベント関数を呼び出してゼロクロッシングをチェックします。すべてのゼロクロッシングをログに記録するには、value が解ベクトル umesh の符号の変化を検出する必要があります。この例のイベントは終了イベントでなく、ゼロクロッシングはすべての傾きで発生する可能性があるため、isterminal と direction を同じサイズのゼロのベクトルとして指定します。
この問題のイベント関数は次のようになります。
function [value,isterminal,direction] = pdevents(m,t,xmesh,umesh) value = umesh; isterminal = zeros(size(umesh)); direction = zeros(size(umesh)); end
解のメッシュの選択
方程式を解く前に、メッシュ点 を、pdepe が解を評価する点として指定する必要があります。この問題では、 および の区間内で 50 点の細かいメッシュを使用します。細かいメッシュを使用することで、振動解の分解能が向上します。
x = linspace(0,1,50); t = linspace(0.1,pi,50);
方程式の求解
最後に、対称性 m、PDE 方程式、初期条件、境界条件、イベント関数、および x と t のメッシュを使用して方程式を解きます。odeset を使用してイベント関数を参照するオプション構造体を作成し、pdepe への最後の入力引数として構造体を渡します。イベント関数とソルバーの両方から情報を返す次の 5 つの出力引数を指定します。
solはpdepeによって計算された解です。tsolは終了イベント前の時間のベクトルです。終了イベントがない場合、tsolはtと等しくなります。soleは各イベントの時点での解です。teは各イベントの時間です。ieは各イベントのインデックスです。イベント関数ではvalues = umeshであるため、ieは、各タイム ステップでイベントをトリガーしたumeshのインデックスを返します。
m = 0; options = odeset(Events=@pdevents); [sol,tsol,sole,te,ie] = pdepe(m,@oscpde,@oscic,@oscbc,x,t,options);
解を行列 u として抽出します。
u = sol(:,:,1);
解のプロット
解の表面プロットを作成し、プロットを上方から表示します。
surf(x,t,u) view(2)
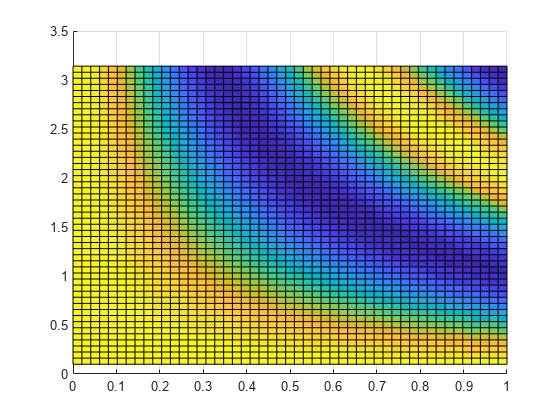
参照用に表面 を使用して、イベントが発生した点をプロットします。出力されたインデックス ベクトル ie は、イベントの位置を選択する際に役立ちます。式 x(ie)' によりイベントが発生した位置の x 値が得られ、式 sole(x==x(ie)') により対応する解の値が得られます。
view([39 30]) xlabel("x") ylabel("t") zlabel("u(x,t)") hold on plot3(x(ie)',te,sole(x==x(ie)'),'r*') surf(x,t,zeros(size(u)),EdgeColor="flat") hold off

ローカル関数
ここでは、PDE ソルバー pdepe が解を計算するために呼び出すローカル補助関数を紹介しています。あるいは、これらの関数を独自のファイルとして MATLAB パスのディレクトリに保存することもできます。
function [c,f,s] = oscpde(x,t,u,dudx) c = 1/x; f = u/t; s = 0; end %---------------------------------------------- function u0 = oscic(x) u0 = 1; end %---------------------------------------------- function [pl,ql,pr,qr] = oscbc(xl,ul,xr,ur,t) pl = ul - 1; ql = 0; pr = ur - cos(pi*t); qr = 0; end %---------------------------------------------- function [value, isterminal, direction] = pdevents(m,t,xmesh,umesh) value = umesh; isterminal = zeros(size(umesh)); direction = zeros(size(umesh)); end %----------------------------------------------
入力引数
出力引数
ヒント
uji = sol(j,:,i)が時間tspan(j)とメッシュ点xmeshで解の要素iを近似する場合、pdevalは、点xoutの配列において近似値とその偏導関数 ∂ui/∂x を評価して、それらをuoutおよびduoutdxに返します ([uout,duoutdx] = pdeval(m,xmesh,uji,xout))。関数pdevalは、流束ではなく偏導関数 ∂ui/∂x を評価します。流束は連続ですが、構成物の接続点では偏導関数は不連続になる場合があるからです。
アルゴリズム
時間積分は、ode15s ソルバーを使用して行います。pdepe は、PDE が楕円方程式を含んでいる場合に生じる微分代数方程式を解くため、また指定したスパース パターンをもつヤコビアンを取り扱うために、ode15s の機能を使用します。
離散化の後、楕円方程式から代数方程式が生成されます。楕円方程式に対応した初期条件の要素が、離散化と矛盾している場合、関数 pdepe は、時間積分を始める前にそれらの調整を試みます。このため、最初の時点に対して返される解は、他の時点のものと同程度の離散化誤差をもっています。メッシュが十分細かい場合、関数 pdepe は与えられた初期条件に近い整合性のある初期条件を検出することができます。関数 pdepe が、整合性のある初期条件を見つけることが困難であるというメッセージを表示する場合は、メッシュをより細かく分割してください。放物線方程式に対応する初期条件ベクトルの要素の調整は必要ありません。
参照
[1] Skeel, R. D. and M. Berzins, "A Method for the Spatial Discretization of Parabolic Equations in One Space Variable," SIAM Journal on Scientific and Statistical Computing, Vol. 11, 1990, pp.1–32.