キャリブレーション ガイドライン
これらのガイドラインは、LiDAR カメラ キャリブレーションで正確な結果を得るのに役立ちます。LiDAR カメラ キャリブレーションの詳細については、LiDAR カメラ キャリブレーションとはを参照してください。
チェッカーボード ガイドライン
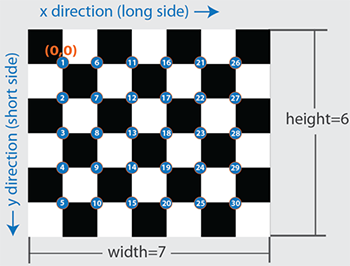
checkerboard関数を使用してチェッカーボード イメージを作成する場合:一方の辺に沿う偶数個の正方形、および隣接する辺に沿う奇数個の正方形を含む矩形のチェッカーボードを作成します。これにより、キャリブレーション パターンは必ず非対称になります。対称なチェッカーボードは不正確な結果を引き起こす可能性があり、推奨されません。
辺の長さの違いやコーナーの色の違いを使用して、チェッカーボードの向きおよび原点を決定できます。LiDAR カメラ キャリブレーター アプリは、チェッカーボードの長辺に x 方向を割り当てます。ボードの原点があいまいで、どの黒いコーナーにも位置する可能性があるため、キャリブレーション ワークフローでは対称なチェッカーボードを使用しないでください。
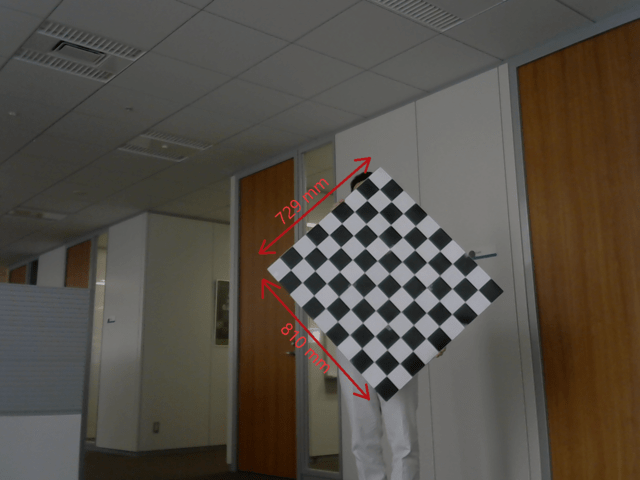
測定誤差を防ぐため、この図に示すように、チェッカーボード パターンを端から端まで印刷し、フォーム ボードに取り付けます。
チェッカーボードの各辺に追加するパディングを正確に測定します。チェッカーボードのコーナーを推定する際、パディング値をベクトルとして LiDAR カメラ キャリブレーター アプリまたは
estimateBoardCornersCamera関数に指定しなければなりません。この図は、チェッカーボードの左側から時計回りに、パディング ベクトルの要素の順序を示しています。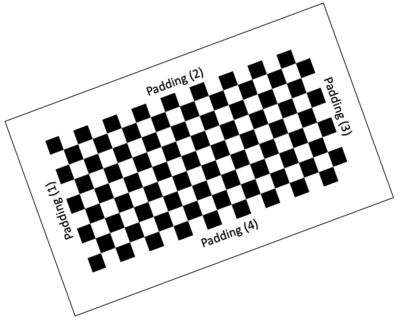
データ取得のガイドライン
モーション ブラーの影響がないように、両方のセンサーから同時にデータを取得します。モーション ブラーはキャリブレーションの精度を低下させる可能性があります。ビデオ記録を使用する場合、各イメージ フレームに対応する点群を慎重に取得します。
チェッカーボードは、カメラの前方軸 (z 軸) および LiDAR センサーの前方軸 (x 軸) の方向に向ける必要があります。
チェッカーボード ターゲットは体に近づけず、腕を完全に伸ばして保持します。そうしない場合、体の一部がターゲットと同一平面にあるように見える可能性があります。これにより、チェッカーボードの検出が不正確になる恐れがあります。
低密度の LiDAR センサーの場合、ターゲットの縁ではなく、背面から保持します。これは、
estimateBoardCornersLidar関数が入力点群の各クラスター内でチェッカーボード平面を探索するためです。誤検出をさらに低減するため、名前と値の引数ROIを使用して、チェッカーボードのおおよその位置を指定します。LiDAR センサーの視点角度 (視野角) に注意します。ボードはセンサーの検出不能領域に配置しないでください。
センサーとチェッカーボードの間の距離に十分注意します。Velodyne® VLP-16 などの低分解能の LiDAR センサーは、遠くにあるチェッカーボードを正確に検出できない場合があります。
チェッカーボード平面から他のアイテムを取り除き、それらがチェッカーボード データとクラスタリングされないようにします。
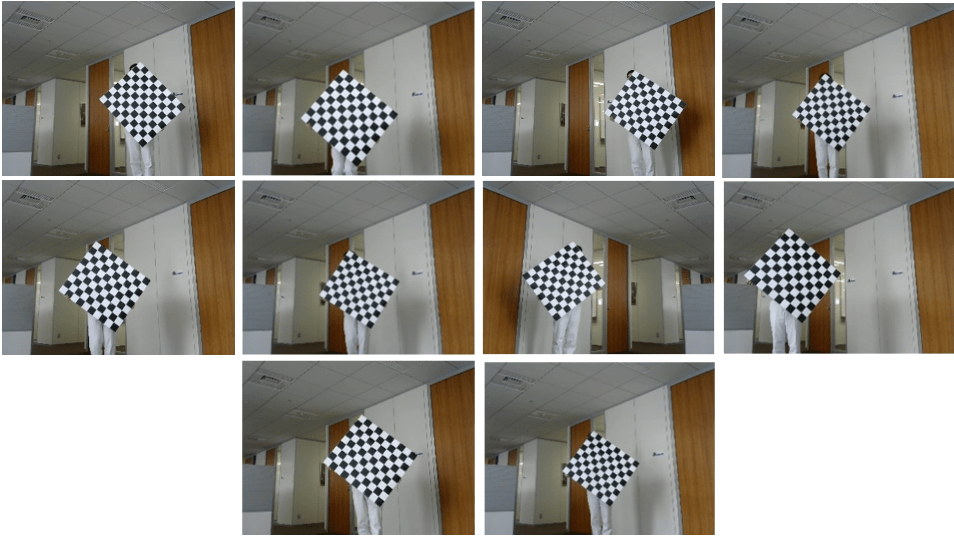
HDL-64 や Ouster OS1-64 のような高分解能の LiDAR センサーの場合は、データ取得時にチェッカーボードを水平または垂直に保持できます。ただし、最良の結果を得るには、データ取得時にチェッカーボードを 45 度に傾けます。
この図は、データ取得時にチェッカーボードを保持するさまざまな方法を示しています。正確なキャリブレーションのため、少なくとも 10 フレームを取得します。
点群データは PCD 形式または PLY 形式で保存しなければなりません。
イメージ ファイルは、MATLAB® でサポートされる任意の標準的なイメージ形式にできます。
キャリブレーション ワークフローの詳細については、LiDAR とカメラのキャリブレーションおよび融合の例を参照してください。
参考
LiDAR カメラ キャリブレーター | estimateBoardCornersLidar | estimateBoardCornersCamera | estimateLidarCameraTransform | projectLidarPointsOnImage | fuseCameraToLidar