LiDAR データからの地面の点と地面以外の点の抽出
関数 velodyneFileReader を使用して、PCAP ファイルから LiDAR データを読み取ります。
veloReader = velodyneFileReader("lidarData_ConstructionRoad.pcap","HDL32E");
入力 LiDAR データから一連の LiDAR データ フレームを抽出する時間区間を指定します。
veloReader.CurrentTime = veloReader.StartTime + seconds(0.5); StopTime = veloReader.StartTime + seconds(10);
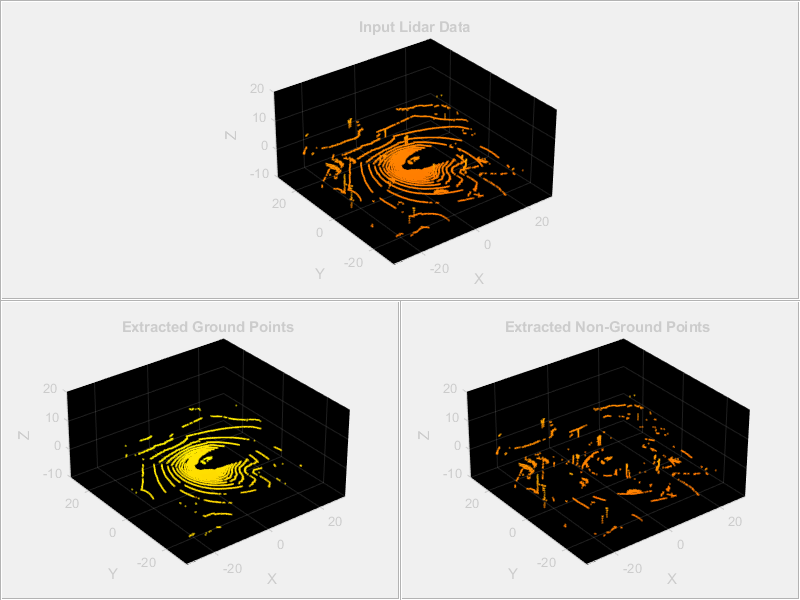
関数 pcplayer を使用して、入力 LiDAR データ フレームと抽出された地面の点を Figure ウィンドウに表示するように構成します。
fig = figure(Position=[0 0 800 600]); xlimits = [-30 30]; ylimits = [-30 30]; zlimits = [-10 20]; hPanel = uipanel(fig,Position=[0 0.5 1 0.5]); hPlot = axes(hPanel); player = pcplayer(xlimits,ylimits,zlimits,Parent=hPlot); hPanel_groundData = uipanel(fig,Position=[0 0 0.5 0.5]); hPlot_groundData = axes(hPanel_groundData); player_groundData = pcplayer(xlimits,ylimits,zlimits,Parent=hPlot_groundData); hPanel_nongroundData = uipanel(fig,Position=[0.5 0 0.5 0.5]); hPlot_nongroundData = axes(hPanel_nongroundData); player_nongroundData = pcplayer(xlimits,ylimits,zlimits,Parent=hPlot_nongroundData);
LiDAR データ フレームを読み取り、関数 segmentGroundFromLidarData を使用して LiDAR データに含まれる地面の点を抽出します。その後、抽出された地面の点のインデックスを使用して、フレームから地面以外の点をセグメント化します。
while (hasFrame(veloReader) && veloReader.CurrentTime < StopTime) % Read a lidar data frame ptCloud = readFrame(veloReader); % Extract ground points from lidar data frame groundPtsIdx = segmentGroundFromLidarData(ptCloud); ptCloudGround = select(ptCloud,groundPtsIdx,OutputSize="full"); % Extract non-ground points from lidar data frame ptCloudNonGround = select(ptCloud,~groundPtsIdx,OutputSize="full"); % Display the input lidar data and the extracted points view(player,ptCloud) title(hPlot,"Input Lidar Data") view(player_groundData,ptCloudGround) title(hPlot_groundData,"Extracted Ground Points") view(player_nongroundData,ptCloudNonGround) title(hPlot_nongroundData,"Extracted Non-Ground Points") colormap(autumn) pause(0.01); end
参考
velodyneFileReader | segmentGroundFromLidarData | pointCloud | pcplayer