ousterFileReader
説明
ousterFileReader オブジェクトは、Ouster® パケット キャプチャ (PCAP) ファイルから点群データを読み取ります。
作成
構文
説明
ousterReader = ousterFileReader(fileName,calibrationFile)ousterFileReader オブジェクトを作成します。PCAP ファイル fileName とキャリブレーション ファイル calibrationFile を指定します。入力に応じて FileName プロパティと CalibrationFile プロパティがそれぞれ設定されます。
サポートされている Ouster センサー モデルの詳細については、DeviceModel プロパティを参照してください。
ousterReader = ousterFileReader(fileName,calibrationFile,Name=Value)SkipPartialFrames プロパティと CoordinateFrame プロパティを指定します。たとえば、ousterFileReader(fileName,calibrationFile,SkipPartialFrames=0) は、不完全なフレームをスキップしない Ouster ファイル リーダーを作成します。
プロパティ
オブジェクト関数
例
Ouster パケット キャプチャ (PCAP) ファイル、および対応するキャリブレーション ファイルを含む ZIP ファイルをダウンロードし、そのファイルを解凍します。
zipFile = matlab.internal.examples.downloadSupportFile("lidar","data/ouster_RoadIntersection.zip"); saveFolder = fileparts(zipFile); pcapFileName = [saveFolder filesep 'ouster_RoadIntersection' filesep 'ouster_RoadIntersection.pcap']; calibFileName = [saveFolder filesep 'ouster_RoadIntersection' filesep 'OS1-128U.json']; if ~(exist(pcapFileName,"file") && exist(calibFileName,"file")) unzip(zipFile,saveFolder); end
ousterFileReader オブジェクトを作成します。
ousterReader = ousterFileReader(pcapFileName,calibFileName);
pcplayer の X 軸、Y 軸、Z 軸の座標軸の範囲をメートル単位で定義します。
xlimits = [-60 60]; ylimits = [-60 60]; zlimits = [-20 20];
点群プレーヤーを作成します。
player = pcplayer(xlimits,ylimits,zlimits);
pcplayer の座標軸のラベルを設定します。
xlabel(player.Axes,"X (m)"); ylabel(player.Axes,"Y (m)"); zlabel(player.Axes,"Z (m)");
開始時間の 0.3 秒後から読み取りを開始するように Ouster ファイル リーダーの CurrentTime を指定します。
ousterReader.CurrentTime = ousterReader.StartTime + seconds(0.3);
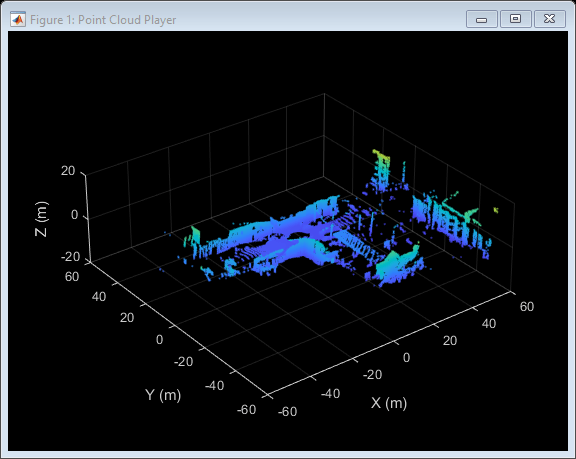
CurrentTime から最終の点群までの点群のストリームを表示します。
while(hasFrame(ousterReader) && player.isOpen()) ptCloud = readFrame(ousterReader); view(player,ptCloud); end
ヒント
リリース別のバージョンのサポート
| リリース | サポートするファームウェア バージョン |
|---|---|
| R2022a | 次のサポートを追加:
|
| R2023a | 次のサポートを追加:
|
| R2023b | 次のサポートを追加:
|
| R2024a | 次のサポートを追加:
|
| R2025a | 次のサポートを追加:
|