e57FileReader
説明
e57FileReader オブジェクトには、E57 ファイルに含まれるメタデータが読み取り専用のプロパティとして格納されます。これらのプロパティは、オブジェクト関数 readPointCloud でファイルから点群データを読み取るために使用します。
E57 ファイル形式は、米国試験材料協会 (ASTM) によって指定されたものであり、XML データ形式に基づいてデータを階層ツリー構造で格納します。複数の点群およびイメージを、関連するセンサーのメタデータと共に格納できます。各 E57 ファイルには、点群データを格納する Data3D 要素と、イメージを格納する Images2D 要素が 1 つずつ含まれています。ファイル形式の詳細については、E57 ファイル形式を参照してください。
作成
説明
e57Reader = e57FileReader(fileName)e57FileReader オブジェクトを作成します。E57 ファイルの絶対パスまたは相対パスを指定する fileName 引数は、FileName オブジェクト プロパティを設定します。fileName は、文字ベクトルまたは string スカラーとして指定します。
プロパティ
オブジェクト関数
readPointCloud | Read point cloud data from E57 file |
readCRS | Read coordinate reference system data from E57 file |
例
E57 ファイルを含む ZIP ファイルをダウンロードし、そのファイルを解凍します。
zipFile = matlab.internal.examples.downloadSupportFile("lidar","data/e57ParkingLot.zip"); saveFolder = fileparts(zipFile); e57FileName = [saveFolder filesep 'parkingLot.e57']; if ~exist(e57FileName,"file") unzip(zipFile,saveFolder) end
ダウンロードした E57 ファイルを使用して e57FileReader オブジェクトを作成します。
e57Reader = e57FileReader(e57FileName);
点群 ptCloudArr および対応する姿勢 tformArr を格納するための変数を定義します。
ptCloudArr = []; tformArr = [];
点群データを読み取ります。
for i = 1:e57Reader.NumPointClouds [ptCloud,pcMetadata] = readPointCloud(e57Reader,i); for j = 1:numel(ptCloud) ptCloudArr = [ptCloudArr ptCloud(j)]; tformArr = [tformArr pcMetadata.RelativePose]; end end
ファイルの点群を配置してマップを作成します。
pcMap = pcalign(ptCloudArr,tformArr);
マップを表示します。
figure pcshow(pcMap)
アルゴリズム
E57 ファイル形式は、汎用の、オープン標準の形式であり、LiDAR センサー、3 次元スキャナー、ステレオ ビジョン システムの点群データを格納し、さらにカメラによって生成された 2 次元イメージ データも格納します。この形式では、データを取得したセンサーに関連付けられているコア メタデータも格納できます。このファイル形式は柔軟性が高く、簡単に解釈できます。
各 E57 ファイルは、XML 形式に基づく階層ツリー構造をもっています。E57 ファイルには、"ヘッダー"、"バイナリ セクション"、および "XML セクション" があります。
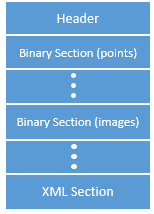
ヘッダー — ファイルのバージョン番号や XML セクションの位置などの情報が含まれています。
バイナリ セクション — 点群およびイメージの実際のデータが含まれています。
XML セクション — バイナリ セクションに格納されているデータを参照する階層ツリーが含まれています。
次の図は、XML セクションの典型的な構造を示しています。
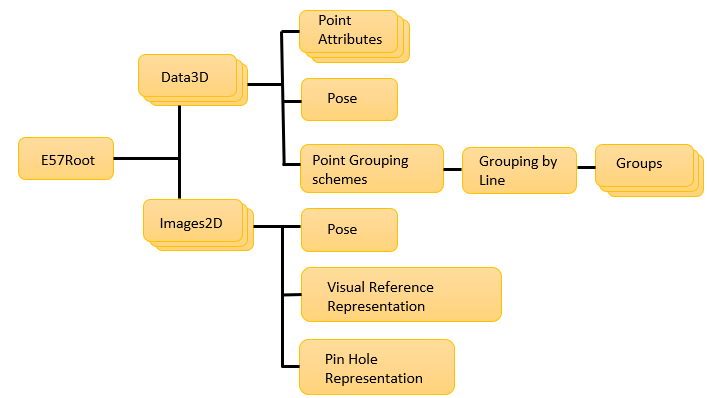
E57Root要素は XML 階層のルート ノードです。点群とイメージが一般的なファイル座標系で格納されます。この構造には、ファイル作成日時など、追加のファイル情報も含まれています。Data3D要素には、各点群が個別の構造として格納されます。各構造には、姿勢情報および点群の個々の点の属性が格納されます。Images2D要素には、Data3D要素と同様に、イメージが個々の構造として格納されます。E57 ファイル形式の詳細については、ASTM インターナショナルの Web サイトで標準仕様を参照してください。