imbilatfilt
ガウス カーネルを使用する、イメージのバイラテラル フィルター処理
構文
説明
J = imbilatfilt(I,degreeOfSmoothing)degreeOfSmoothing が小さい値の場合、imbilatfilt は小さい分散 (一様な領域) をもつ近傍を平滑化し、強いエッジなどの大きい分散をもつ近傍は平滑化されません。degreeOfSmoothing の値を増やすと、imbilatfilt は一様な領域と大きい分散をもつ近傍の両方を平滑化します。
J = imbilatfilt(I,degreeOfSmoothing,spatialSigma)spatialSigma も指定します。spatialSigma の値を大きくすると、離れた近傍ピクセルの寄与が増え、実質的に近傍サイズが増加します。
J = imbilatfilt(___,Name=Value)
例
グレースケール イメージを読み取り、それを表示します。空の領域に水平のすじ状のアーティファクトが見られます。
I = imread('cameraman.tif');
imshow(I)
空の領域のイメージのパッチを検査します。ノイズの分散を近似する、パッチの分散を計算します。
patch = imcrop(I,[170, 35, 50 50]); imshow(patch)
patchVar = std2(patch)^2;
バイラテラル フィルターでイメージをフィルター処理します。平滑化の度合いをノイズの分散よりも大きくなるように設定します。
DoS = 2*patchVar;
J = imbilatfilt(I,DoS);
imshow(J)
title(['Degree of Smoothing: ',num2str(DoS)])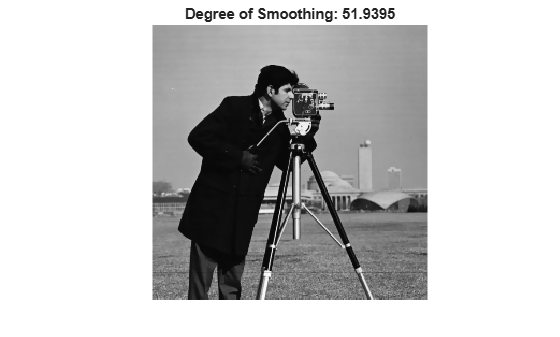
すじ状のアーティファクトは減少しますが、なくなることはありません。平滑化を改善するには、spatialSigma の値を 2 に増やし、離れた近傍のピクセルがガウス平滑化カーネルよりも寄与が大きくなるようにします。これが実質的に、バイラテラル フィルターの空間範囲を増やします。
K = imbilatfilt(I,DoS,2); imshow(K) title(['Degree of Smoothing: ',num2str(DoS),', Spatial Sigma: 2'])
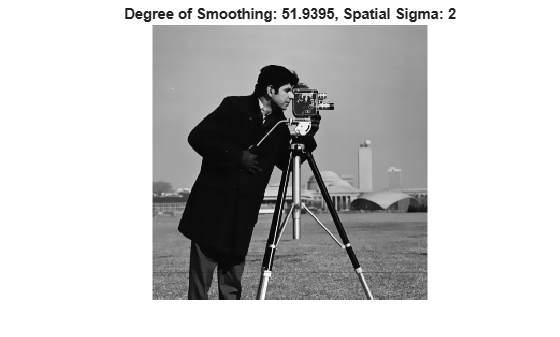
空の領域のすじ状のアーティファクトがうまく削除されています。人物のシルエットのような強いエッジの鮮鋭度やイメージの前景にある芝生のようなテクスチャ領域は保たれます。
RGB イメージを読み取ります。
imRGB = imread("coloredChips.png");
imshow(imRGB)
イメージを L*a*b* 色空間に変換します。バイラテラル フィルターが知覚的に類似した色を平滑化します。
imLAB = rgb2lab(imRGB);
シャープなエッジがないパッチを抽出します。L*a*b* 色空間で、原点からのユークリッド距離の分散を計算します。
patch = imcrop(imLAB,[34,71,60,55]); patchSq = patch.^2; edist = sqrt(sum(patchSq,3)); patchVar = std2(edist).^2;
バイラテラル フィルターを使用して L*a*b 色空間のイメージをフィルター処理します。DegreeOfSmoothing 値をパッチの分散よりも大きくなるように設定します。
DoS = 2*patchVar; smoothedLAB = imbilatfilt(imLAB,DoS);
イメージを RGB 色空間に変換し直して、平滑化されたイメージを表示します。
smoothedRBG = lab2rgb(smoothedLAB,"Out","uint8"); montage({imRGB,smoothedRBG}) title("Original Image vs. Filtered Image with Degree of Smoothing: "+num2str(DoS))

チップの各色と黒のペンはさらに一様に表示されますが、テーブルの水平方向の粒状感がまだ見られます。フィルターの実質的な近傍が水平の粒間のスペース (この距離は約 7 ピクセル) をカバーするように、フィルターの空間範囲を増やします。また DegreeOfSmoothing を増やし、これらの領域をさらに大胆に平滑化します。
DoS2 = 4*patchVar; sigma = 7; smoothedLAB2 = imbilatfilt(imLAB,DoS2,sigma); smoothedRBG2 = lab2rgb(smoothedLAB2,"Out","uint8"); montage({imRGB,smoothedRBG2}) title("Original Image vs. Filtered Image with Degree of Smoothing: "+num2str(DoS)+ ... " and Spatial Sigma: "+sigma)

木製のテーブルの色は、近傍と平滑化の度合いが大きくなると、さらに一様になります。チップとペンのエッジの鮮鋭度が維持されています。
入力引数
名前と値の引数
出力引数
ヒント
degreeOfSmoothing値は、バイラテラル フィルターの範囲ガウス カーネルの分散に対応します [1]。範囲ガウスは近傍の値からピクセル値のユークリッド距離に適用されます。RGB イメージの知覚的に近い色を平滑化するには、
rgb2labを使用してそのイメージを CIE L*a*b* 空間に変換してから、バイラテラル フィルターを適用します。結果を表示するには、lab2rgbを使用して、フィルター処理されたイメージを RGB に変換します。spatialSigmaを増やすと、NeighborhoodSizeが増加し、フィルターの実行時間も増加します。小さいNeighborhoodSizeを指定して、精度と実行時間のバランスを調整します。
参照
[1] Tomasi, C., and R. Manduchi. "Bilateral Filtering for Gray and Color Images". Proceedings of the 1998 IEEE® International Conference on Computer Vision. Bombay, India. Jan 1998, pp. 836–846.
拡張機能
バージョン履歴
R2018a で導入参考
imdiffusefilt | imgaussfilt | imguidedfilter | imfilter | nlfilter | locallapfilt | imnlmfilt