imnlmfilt
イメージの非局所平均フィルター処理
説明
例
グレースケール イメージを読み取ります。
I = imread('cameraman.tif');関数 imnoise を使用して、分散 0.0015 のゼロ平均のガウス ホワイト ノイズをイメージに追加します。
noisyImage = imnoise(I,'gaussian',0,0.0015);非局所平均フィルター処理によりイメージからノイズを除去します。関数 imnlmfilt は、イメージ内のノイズの標準偏差に基づいて平滑化の度合いを推定します。
[filteredImage,estDoS] = imnlmfilt(noisyImage);
ノイズを含むイメージ (左) と非局所平均フィルター済みのイメージ (右) をモンタージュとして表示します。推定した平滑化の度合い estDoS を Figure のタイトルに表示します。
非局所平均フィルターは入力イメージからノイズを除去しますが、人物や建物のシルエットのような強いエッジの鮮鋭度は保たれます。この関数はイメージの前景にある芝生のようなテクスチャ領域も平滑化します。ノイズを含むイメージに比べると細部が失われます。
montage({noisyImage,filteredImage})
title(['Estimated Degree of Smoothing, ', 'estDoS = ',num2str(estDoS)])
カラー イメージを読み取ります。
imRGB = imread('peppers.png');関数imnoiseを使用して、ゼロ平均で分散 0.0015 のガウス ホワイト ノイズをイメージに追加します。ノイズを含む RGB イメージを表示します。
noisyRGB = imnoise(imRGB,'gaussian',0,0.0015);
imshow(noisyRGB)
ノイズを含む RGB イメージを L*a*b 色空間に変換します。非局所平均フィルターが知覚的に類似した色を平滑化します。
noisyLAB = rgb2lab(noisyRGB);
ノイズを含む背景から均一な L*a*b パッチを抽出し、ノイズ標準偏差を計算します。
roi = [210,24,52,41]; patch = imcrop(noisyLAB,roi);
この L*a*b パッチで、原点からのユークリッド距離 edist を計算します。その後、edist の標準偏差を計算し、ノイズを推定します。
patchSq = patch.^2; edist = sqrt(sum(patchSq,3)); patchSigma = sqrt(var(edist(:)));
'DegreeOfSmoothing' 値をパッチの標準偏差よりも大きくなるように設定します。非局所平均フィルター処理を使用してノイズを含む L*a*b* イメージをフィルター処理します。
DoS = 1.5*patchSigma;
denoisedLAB = imnlmfilt(noisyLAB,'DegreeOfSmoothing',DoS);フィルター処理された L*a*b* イメージを RGB 色空間に変換します。フィルター処理された RGB イメージを表示します。
denoisedRGB = lab2rgb(denoisedLAB,'Out','uint8'); imshow(denoisedRGB)

ノイズを含む RGB イメージ (左) のパッチと非局所平均フィルター済みの RGB イメージ (右) の同じパッチを比較します。
roi2 = [178,68,110,110];
montage({imcrop(noisyRGB,roi2),imcrop(denoisedRGB,roi2)})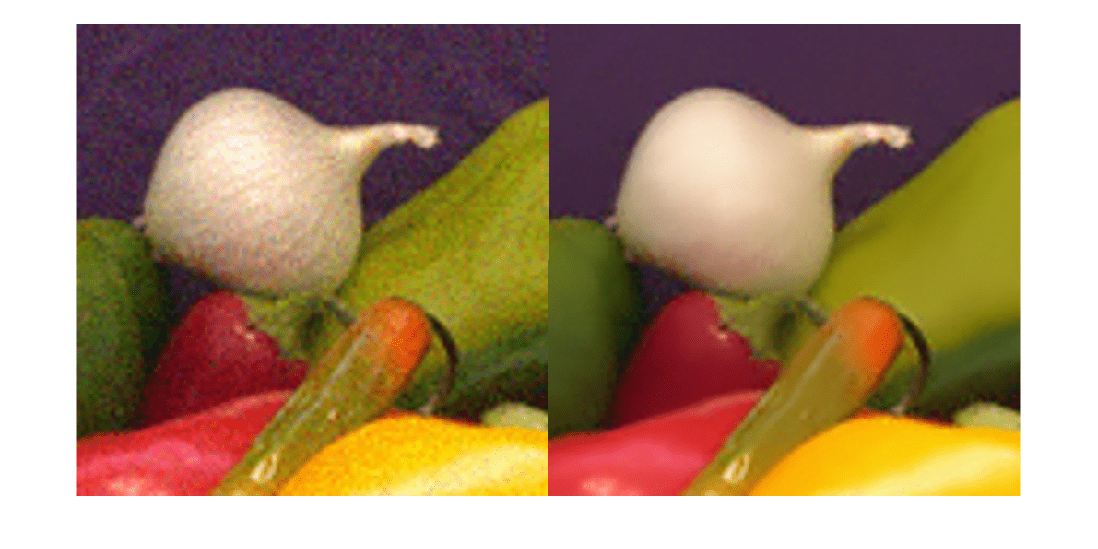
入力引数
名前と値の引数
出力引数
ヒント
アルゴリズム
参照
[1] Buades, A., B. Coll, and J.-M. Morel. "A Non-Local Algorithm for Image Denoising." 2005 IEEE® Computer Society Conference on Computer Vision and Pattern Recognition. Vol. 2, June 2005, pp. 60–65.
[2] Immerkær, J. "Fast Noise Variance Estimation." Computer Vision and Image Understanding. Vol. 64, Number 2, Sept. 1996, pp. 300–302.