Nonlinear Model Identification Basics
Use nonlinear model identification when a linear model does not completely capture your system dynamics. You can identify nonlinear models in the System Identification app or at the command line. System Identification Toolbox™ enables creation and estimation of four nonlinear model structures:
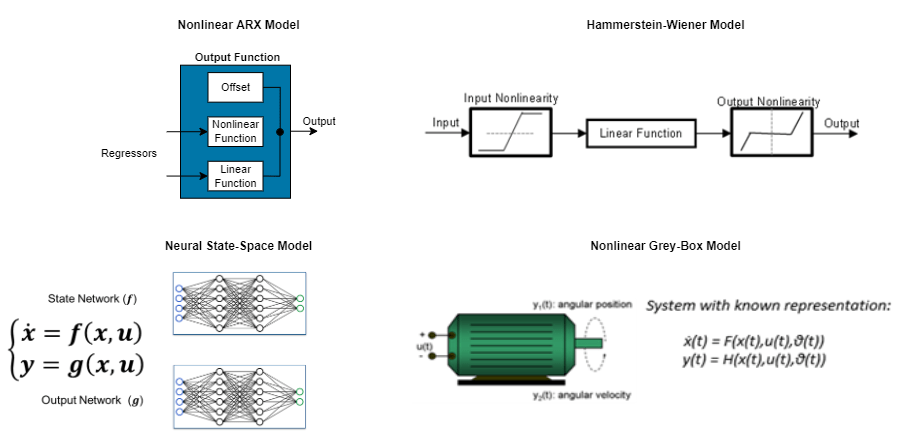
Nonlinear ARX models — Represent nonlinearities in your system using dynamic nonlinear mapping objects such as wavelet networks, tree-partitioning, and sigmoid networks.
Hammerstein-Wiener models — Estimate static nonlinearities in an otherwise linear system.
Nonlinear grey-box models — Represent your nonlinear system using ordinary differential or difference equations (ODEs) with unknown parameters.
Neural state-space models — Use neural networks to represent the functions that define the nonlinear state-space realization of your system.
Topics
Nonlinear Identified Models
- About Identified Nonlinear Models
Dynamic models in System Identification Toolbox software are mathematical relationships between the inputs u(t) and outputs y(t) of a system. - Nonlinear Model Structures
Construct model objects for nonlinear model structures, access model properties. - Available Nonlinear Models
The System Identification Toolbox software provides four types of nonlinear model structures: - Black-Box Modeling
Black-box modeling is useful when your primary interest is in fitting the data regardless of a particular mathematical structure of the model. - Types of Model Objects
Model object types include numeric models, for representing systems with fixed coefficients, and generalized models for systems with tunable or uncertain coefficients.
Model Estimation
- Identify Nonlinear Black-Box Models Using System Identification App
Identify nonlinear black-box models from single-input/single-output (SISO) data using the System Identification app. - Modeling Multiple-Output Systems
Use a multiple-output modeling technique that suits the complexity and internal input-output coupling of your system. - Preparing Data for Nonlinear Identification
Estimating nonlinear ARX and Hammerstein-Wiener models requires uniformly sampled time-domain data. - Loss Function and Model Quality Metrics
Configure the loss function that is minimized during parameter estimation. After estimation, use model quality metrics to assess the quality of identified models. - Regularized Estimates of Model Parameters
Regularization is the technique for specifying constraints on the flexibility of a model, thereby reducing uncertainty in the estimated parameter values. - Estimation Report
The estimation report contains information about the results and options used for a model estimation. - Next Steps After Getting an Accurate Model
How you can work with identified models.