Cholesky Factorization
Factor square Hermitian positive definite matrix into triangular components
Libraries:
DSP System Toolbox /
Math Functions /
Matrices and Linear Algebra /
Matrix Factorizations
Description
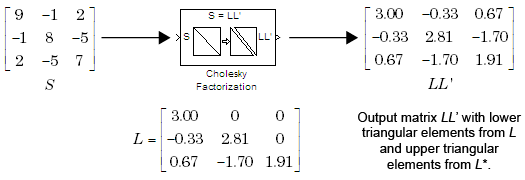
The Cholesky Factorization block uniquely factors the square Hermitian positive definite input matrix S as
where L is a lower triangular square matrix with positive diagonal elements and L' is the Hermitian (complex conjugate) transpose of L.
Note that L and L' share the same diagonal in the output matrix. Cholesky factorization requires half the computation of Gaussian elimination (LU decomposition), and is always stable.
Ports
Input
Output
The block outputs a square matrix with lower triangle elements from L
and upper triangle elements from
L'. The output is not
in the same form as the output of the MATLAB®
chol function. In order to convert the output of
the Cholesky Factorization block to the MATLAB form, use the following equation:
R = triu(LL');
In order to extract the L matrix exclusively, pass
the output of the Cholesky Factorization block,
LL', to the Extract Triangular Matrix
block. Setting the Extract parameter of the
Extract Triangular Matrix to
Lower extracts the L
matrix. Setting the Extract parameter to
Upper extracts the
L' matrix.
In this diagram, LL' is the output of the
Cholesky Factorization block. Due to round off error,
these equations do not produce a result that is exactly the same as the
MATLAB result.
Block Output Composed of L and L *
Data Types: single | double
Complex Number Support: Yes
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
References
[1] Golub, G. H., and C. F. Van Loan. Matrix Computations. 3rd ed. Baltimore, MD: Johns Hopkins University Press, 1996.
Extended Capabilities
Version History
Introduced before R2006a
See Also
Functions
Blocks
- Autocorrelation LPC | Cholesky Inverse | Cholesky Solver | LDL Factorization | LU Factorization | QR Factorization