Autocorrelation LPC
N 次の前方線形予測子の係数の決定

ライブラリ:
DSP System Toolbox /
Estimation /
Linear Prediction
説明
Autocorrelation LPC ブロックでは、最小二乗的に予測誤差を最小にすることで、長さ M の入力チャネル u ごとの時系列について、"N ステップの前方線形予測子" の係数が決定されます。線形予測子は、現在と過去の入力から、シーケンス内の次の値を予測する FIR フィルターです。この手法は、フィルター設計、音声符号化、スペクトル解析、およびシステム同定に応用されます。
Autocorrelation LPC ブロックは、多項式係数または反射係数、あるいはその両方で各チャネルの予測誤差を出力することができます。また、各チャネルの予測誤差パワーも出力できます。
例
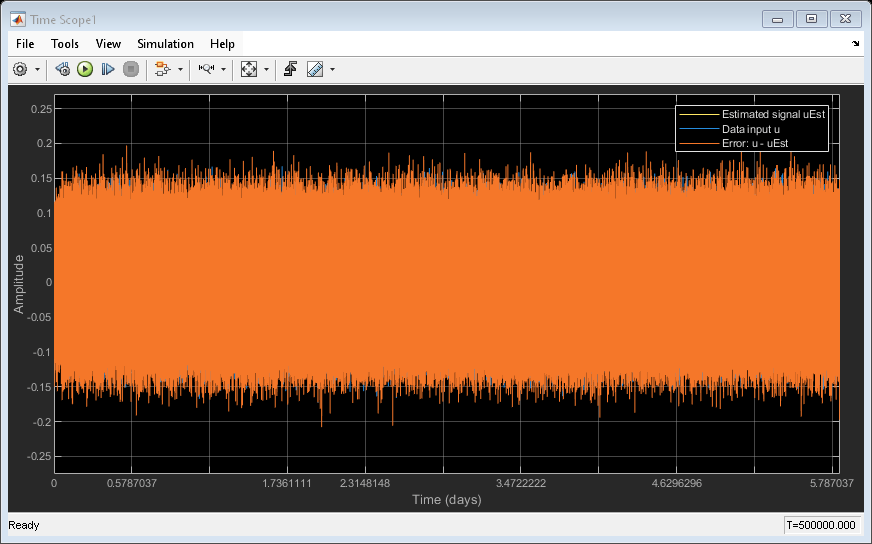
Estimate Data Series Using Forward Linear Predictor
Use the Autocorrelation LPC block to estimate the future values of signal.
端子
入力
出力
パラメーター
ブロックの特性
データ型 |
|
直達 |
|
多次元信号 |
|
可変サイズの信号 |
|
ゼロクロッシング検出 |
|
アルゴリズム
Autocorrelation LPC ブロックでは、次の最小二乗の解が計算されます。
ここで、 は 2 ノルムを示し、また
正規方程式を介して、次の最小二乗問題を解くと、
次の連立方程式に導かれます。
ここで、r = [r1 r2 r3 ... rn+1]T は、Autocorrelation ブロックを使用して計算された u に対する自己相関の推定で、* は複素共役転置を示します。正規方程式は、Levinson-Durbin ブロックによる O(n2) の演算で解かれます。
LPC 問題の解は、スペクトル推定のユール・ウォーカー AR 法に非常に密接に関連していることに注意してください。その場合、上記の正規方程式はユール・ウォーカー AR 方程式と呼ばれます。
参照
[1] Haykin, S. Adaptive Filter Theory. 3rd ed. Englewood Cliffs, NJ: Prentice Hall, 1996.
[2] Ljung, L. System Identification: Theory for the User. Englewood Cliffs, NJ: Prentice Hall, 1987. Pgs. 278-280.
[3] Proakis, J. and D. Manolakis. Digital Signal Processing. 3rd ed. Englewood Cliffs, NJ: Prentice-Hall, 1996.
拡張機能
バージョン履歴
R2006a より前に導入