narnet
(削除予定) 非線形自己回帰ニューラル ネットワーク
narnet は将来のリリースで削除される予定です。詳細については、Transition Legacy Neural Network Code to dlnetwork Workflowsを参照してください。
コードの更新に関するアドバイスについては、バージョン履歴を参照してください。
説明
narnet( は、次の引数を取ります。feedbackDelays,hiddenSizes,feedbackMode,trainFcn)
増加する 0 または正のフィードバック遅延から成る行ベクトル
feedbackDelays1 つ以上の隠れ層のサイズの行ベクトル
hiddenSizesフィードバックのタイプ
feedbackMode学習関数
trainFcn
これは、NAR ニューラル ネットワークを返します。
NAR (非線形自己回帰) ニューラル ネットワークには、時系列の過去の値からその時系列を予測するように学習させることができます。
例
非線形自己回帰 (NAR) ニューラル ネットワークの学習および新しい時系列データでの予測を行います。時系列の一連の値の予測は、"複数ステップの予測" としても知られています。閉ループ ネットワークは複数ステップの予測を実行できます。閉ループ ネットワークは、外部フィードバックが失われた場合に、内部フィードバックを使用して予測を続けることができます。NAR による予測では、時系列の将来の値を、その時系列の過去の値のみから予測します。
簡単な時系列の予測データを読み込みます。
T = simplenar_dataset;
NAR ネットワークを作成します。隠れ層のフィードバック遅延とサイズを定義します。
net = narnet(1:2,10);
preparets を使用して時系列データを準備します。この関数は、初期の入力遅延状態と層の遅延状態を入力するのに必要なステップ数だけ、入力とターゲットの時系列を自動的にシフトします。
[Xs,Xi,Ai,Ts] = preparets(net,{},{},T);ネットワークを完全に開ループで作成してから、複数ステップ先の予測を行うために、そのネットワークを閉ループに変換することを推奨します。これにより、この閉ループ ネットワークを使用して必要なだけ先の値を予測することができます。このニューラル ネットワークを閉ループ モードのみでシミュレーションすると、このネットワークは入力系列に含まれるタイム ステップ数と同じ数だけ予測を実行できます。
NAR ネットワークに学習をさせます。関数 train は、検証ステップおよびテスト ステップを含め、開ループ (直並列アーキテクチャ) でネットワークの学習を行います。
net = train(net,Xs,Ts,Xi,Ai);
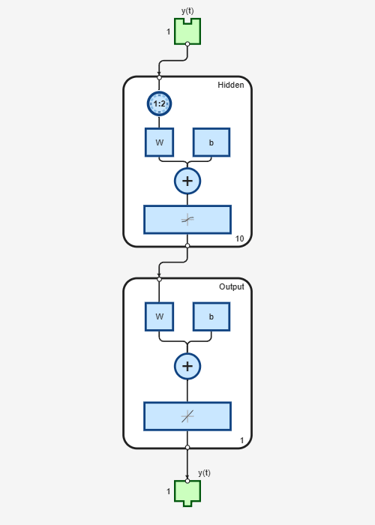
学習済みネットワークを表示します。
view(net)
ネットワーク入力 Xs、初期の入力状態 Xi、および初期の層の状態 Ai から、開ループ ネットワークのネットワーク出力 Y、最終の入力状態 Xf、および最終の層の状態 Af を計算します。
[Y,Xf,Af] = net(Xs,Xi,Ai);
ネットワーク性能を計算します。
perf = perform(net,Ts,Y)
perf = 1.0100e-09
次の 20 タイム ステップの出力を予測するには、まず閉ループ モードでネットワークのシミュレーションを行います。開ループ ネットワーク net の最終の入力状態 Xf と層の状態 Af が、閉ループ ネットワーク netc の初期の入力状態 Xic と層の状態 Aic になります。
[netc,Xic,Aic] = closeloop(net,Xf,Af);
閉ループ ネットワークを表示します。このネットワークには入力が 1 つだけあります。閉ループ モードでは、この入力が出力に接続されます。遅延付きターゲット入力が遅延付き直接出力接続に置き換えられます。
view(netc)

20 タイム ステップ先のネットワークのシミュレーションを行うには、長さ 20 の空の cell 配列を入力します。ネットワークには、Xic および Aic に指定されている初期条件のみが必要です。
Yc = netc(cell(0,20),Xic,Aic)
Yc=1×20 cell array
{[0.8346]} {[0.3329]} {[0.9084]} {[1.0000]} {[0.3190]} {[0.7329]} {[0.9801]} {[0.6409]} {[0.5146]} {[0.9746]} {[0.9077]} {[0.2807]} {[0.8651]} {[0.9897]} {[0.4093]} {[0.6838]} {[0.9976]} {[0.7007]} {[0.4311]} {[0.9660]}