getPathFilters
リンクレベル MIMO チャネルのパス フィルター インパルス応答の取得
説明
pathFilters = getPathFilters(channel)channel のパス フィルター インパルス応答を返します。nrCDLChannel、nrTDLChannel、または nrHSTChannel の System object™ としてチャネルを指定します。完全なチャネル推定を再構築するには、チャネル オブジェクトによって返される出力引数 pathGains と一緒に pathFilters を使用します。
メモ
channelが HST-SFN チャネル プロファイルをもつnrHSTChannelSystem object である場合、パス フィルターは時変であり、チャネルの状態に依存します。この場合、返されるパス フィルターは、常にチャネル オブジェクトの最後の呼び出しに関連したものになります。他のすべてのチャネルでは、チャネル オブジェクトの呼び出しによってパス フィルターが変化することはありません。
例
チャネル インパルス応答を再構築し、TR 38.901 の Section 7.7.1 の遅延プロファイル CDL-D を使った Clustered Delay Line (CDL) チャネル モデルのパス フィルターを使用してタイミング オフセット推定を実行します。
nrCDLChannel System object を使用して、チャネル構成の構造体を定義します。遅延プロファイル CDL-D、遅延スプレッド 10 ns、および UE 速度 15 km/h を使用します。
v = 15.0; % UE velocity in km/h fc = 4e9; % carrier frequency in Hz c = physconst('lightspeed'); % speed of light in m/s fd = (v*1000/3600)/c*fc; % UE max Doppler frequency in Hz cdl = nrCDLChannel; cdl.DelayProfile = 'CDL-D'; cdl.DelaySpread = 10e-9; cdl.CarrierFrequency = fc; cdl.MaximumDopplerShift = fd;
送信アレイを [M N P Mg Ng] = [2 2 2 1 1] として構成します。これは、2 行 2 列のアンテナ アレイ (M=2、N=2) を備え、かつ偏波角 P=2 である 1 つのパネル (Mg=1、Ng=1) を表します。受信アンテナ アレイを [M N P Mg Ng] = [1 1 2 1 1] として構成します。これは、同じ場所に配置された交差偏波アンテナの単一のペアを表します。
cdl.TransmitAntennaArray.Size = [2 2 2 1 1]; cdl.ReceiveAntennaArray.Size = [1 1 2 1 1];
8 つのアンテナでサブフレーム時間 1 のランダムな波形を作成します。
SR = 15.36e6; T = SR * 1e-3; cdl.SampleRate = SR; cdlinfo = info(cdl); Nt = cdlinfo.NumTransmitAntennas; txWaveform = complex(randn(T,Nt),randn(T,Nt));
チャネルを介して入力波形を送信します。
[rxWaveform,pathGains] = cdl(txWaveform);
チャネル フィルター処理で使用されるパス フィルターを取得します。
pathFilters = getPathFilters(cdl);
nrPerfectTimingEstimate を使用してタイミング オフセット推定を実行します。
[offset,mag] = nrPerfectTimingEstimate(pathGains,pathFilters);
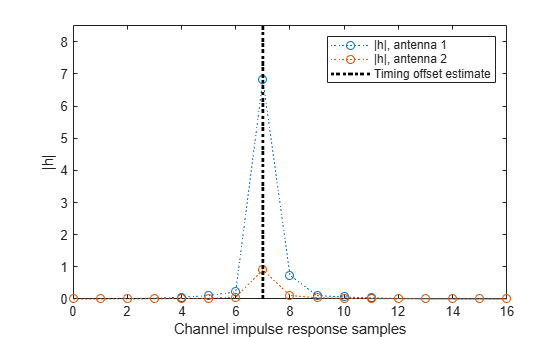
チャネル インパルス応答の大きさをプロットします。
[Nh,Nr] = size(mag); plot(0:(Nh-1),mag,'o:'); hold on; plot([offset offset],[0 max(mag(:))*1.25],'k:','LineWidth',2); axis([0 Nh-1 0 max(mag(:))*1.25]); legends = "|h|, antenna " + num2cell(1:Nr); legend([legends "Timing offset estimate"]); ylabel('|h|'); xlabel('Channel impulse response samples');
受信アンテナを 1 つもつ HST-SFN マルチタップ チャネル モデルを作成します。
hst = nrHSTChannel( ... ChannelProfile='HST-SFN', ... NumReceiveAntennas=1);
gNodeB 間の距離を 700 m に設定します。線路と gNodeB の間の最小距離を 150 m に設定します。
hst.Ds = 700; hst.Dmin = 150;
列車の速度を 500 km/h に設定します。最大ドップラー シフトを 870 Hz に設定します。
hst.Velocity = 500; hst.MaximumDopplerShift = 870;
チャネル フィルター処理を無効にします。
hst.ChannelFiltering = false;
サンプル レートとチャネル サンプル数を設定して、1 ms のパス ゲイン サンプルを計算します。
hst.SampleRate = 30.72e6; hst.NumTimeSamples = hst.SampleRate*1e-3;
チャネルの初期時間を設定し、列車の開始位置を構成します。リモート gNodeB に対する列車の相対位置によって、各 gNodeB の信号の遅延が決まります。
hst.InitialTime = (hst.Ds/3)/(hst.Velocity/3.6);
チャネルからパス ゲインを取得します。
pathGains = hst();
前のチャネル呼び出しに関連するチャネル パス フィルター応答を取得します。各 gNodeB の信号の遅延は時間とともに変化します。
pathFilters = getPathFilters(hst);
タイミング オフセットを取得してチャネル遅延を推定します。
offset = nrPerfectTimingEstimate(pathGains,pathFilters);
パス フィルターと推定チャネル遅延を表示します。
plot(0:size(pathFilters,1)-1,pathFilters); hold on stem(repmat(offset,1,hst.NumTaps),pathFilters(1+offset,:),'k') legend(["Tap "+ (1:hst.NumTaps) "Timing offset"]) xlabel('Filter Delay (Samples)') ylabel('Amplitude') title('Impulse Response of Channel Filters')

入力引数
出力引数
参照
[1] 3GPP TR 38.901. “Study on channel model for frequencies from 0.5 to 100 GHz.” 3rd Generation Partnership Project; Technical Specification Group Radio Access Network.
[2] 3GPP TS 38.101-4. “NR; User Equipment (UE) radio transmission and reception; Part 4: Performance requirements.” 3rd Generation Partnership Project; Technical Specification Group Radio Access Network.