結果:
So I have taken the 3D UAV obstacle avoidance example and implemeneted path planning using DDPG on it. My agent learns to take the shortest path by avoiding the obstacle but as soon as I define a reset function and spawning the location of the agent between 2 postions it fails to learn. The main issue is that during a single training it learns to reach the goal from one position and when it is spawned to another location it was trainined on it takes the same path as before. The training for a single position is trained in like 100 to 150 episodes whereas when I spawn to two locations it wont converge ever after 10000 episodes.
I'll share the training curve for the agent being spawned at two locations.( Episodes greater than equal to 150 represent that it has reached the goal in the shortest path)
Observation:
Lidar Ranges (40 total ranges with max range of 5)
distance to goal
derivative of distance to goal
(I also tried adding more things to my observation such as pitch,yaw,roll and etc but that ultimately made the agent unable to converge faster)
Actions:
Pitch and Roll( -pi/7 to pi/7)
Yaw (-pi to pi)
Reward Function
Pitch, Roll and Yaw have a very small penalty
Penalty for hitting Obstacle (Large)
Reaching Goal
if derivative of disatance to goal is less than 0 its absoulte value is given as reward with a gain( rewarding the agent to maximize it velocity in the direction of the Goal)
minor step penalty
Termination Criteria:
If hit obstacle
If reached goal
Create the agent options object
agentOptions = rlDDPGAgentOptions();
% specify the options
agentOptions.SampleTime = Ts; %sampling time of 0.025 and final time of 25
agentOptions.MiniBatchSize = 256;
agentOptions.ExperienceBufferLength = 1e6;
agentOptions.MaxMiniBatchPerEpoch = 200;
% optimizer options
agentOptions.ActorOptimizerOptions.LearnRate = 1e-3;
agentOptions.ActorOptimizerOptions.GradientThreshold = 1;
agentOptions.CriticOptimizerOptions.LearnRate = 1e-3;
agentOptions.CriticOptimizerOptions.GradientThreshold = 1;
% exploration options
agentOptions.NoiseOptions.StandardDeviation = 0.15;
agentOptions.NoiseOptions.MeanAttractionConstant = 0.15;
initOpts = rlAgentInitializationOptions(NumHiddenUnit=256);
UAVQuadrotor = rlDDPGAgent(obsInfo,actInfo,initOpts,agentOptions);
Check out the result of "emoji matrix" multiplication below.
- vector multiply vector:
a = ["😁","😁","😁"]
b = ["😂";
"😂"
"😂"]
c = a*b
d = b*a
- matrix multiply matrix:
matrix1 = [
"😀", "😃";
"😄", "😁"]
matrix2 = [
"😆", "😅";
"😂", "🤣"]
resutl = matrix1*matrix2
enjoy yourself!
Creating data visualizations
79%
Interpreting data visualizations
21%
28 票
what is the new modification for matlab 2024 and 2023b version , some of my code is showing error?
2024a版本下的runtime进行complier程序封装后,封装后的程序怎么在win7系统上使用?会显示很多不兼容问题,需要配置很多dll文件,能不能在封装时候就解决这些问题。
在分类学习器中,点击特征选择,页面就会一直停留在正在打开特征选择选项。然后命令行窗口会出现警告。警告的内容为警告: 执行为类 mlearnapp.internal.ui.toolstrip.GenericButtonView 定义的事件 Clicked 的侦听程序回调时出现错误:
错误使用 normalize
输入参数太多。
In the classification learner, click Feature Selection and the page will stay with the feature selection option open. A warning will then appear in the command line window. Warning for warning: the contents of execution for the class mlearnapp. Internal. UI. Toolstrip. GenericButtonView defined event Clicked listener error correction:
Use normalize incorrectly
Too many input parameters.
I am looking for a Simulink tutor to help me with Reinforcement Learning Agent integration. If you work for MathWorks, I am willing to pay $30/hr. I am working on a passion project, ready to start ASAP. DM me if you're interested.
Bitte um Hilfe beim Kauf
I love it all
45%
Love the first snowfall only
15%
Hate it
17.5%
It doesn't snow where I live
22.5%
40 票
Since May 2023, MathWorks officially introduced the new Community API(MATLAB Central Interface for MATLAB), which supports both MATLAB and Node.js languages, allowing users to programmatically access data from MATLAB Answers, File Exchange, Blogs, Cody, Highlights, and Contests.
I’m curious about what interesting things people generally do with this API. Could you share some of your successful or interesting experiences? For example, retrieving popular Q&A topics within a certain time frame through the API and displaying them in a chart.
If you have any specific examples or ideas in mind, feel free to share!
function Shrinking_bvp4c
clc
clear all
clear all
% defining parameters
k=0.5,K=0.8,M=0.3,S=2.0;
sol1 = bvpinit(linspace(0,20,25),[1 1 1 0]);
sol = bvp4c(@bvp2D,@bc2D,sol1);
x = sol.x;
y = sol.y;
%%% Plotting of the velocity
figure (1)
plot(x, y(2, :) ,'linewidth', 1)
hold on
xlabel('\eta', 'fontweight', 'bold', 'fontsize', 16)
ylabel('f^{\prime}(\eta)', 'fontweight', 'bold', 'fontsize', 16)
%% Residual of the boundary conditions
function residual = bc2D(y0, yinf)
residual=[y0(1)-S; y0(2) - 1; yinf(2)];
end
%% System of First Order ODEs
function yvector = bvp2D(t,y)
yy1 = 1/y(1)*(y(2)*y(2)-y(1)*y(3)-y(4)+k*(2*y(2)*y(4)-y(3)*y(3))+M*y(2)+K*y(2));
yvector = [y(2);y(3);yy1];
end
end
For Valentine's day this year I tried to do something a little more than just the usual 'Here's some MATLAB code that draws a picture of a heart' and focus on how to share MATLAB code. TL;DR, here's my advice
- Put the code on GitHub. (Allows people to access and collaborate on your code)
- Set up 'Open in MATLAB Online' in your GitHub repo (Allows people to easily run it)
I used code by @Zhaoxu Liu / slandarer and others to demonstrate. I think that those two steps are the most impactful in that they get you from zero to one but If I were to offer some more advice for research code it would be
3. Connect the GitHub repo to File Exchange (Allows MATLAB users to easily find it in-product).
4. Get a Digitial Object Identifier (DOI) using something like Zenodo. (Allows people to more easily cite your code)
There is still a lot more you can do of course but if everyone did this for any MATLAB code relating to a research paper, we'd be in a better place I think.
Here's the article: On love and research software: Sharing code with your Valentine » The MATLAB Blog - MATLAB & Simulink
What do you think?
On my computers, this bit of code produces an error whose cause I have pinpointed,
load tstcase
ycp=lsqlin(I, y, Aineq, bineq);
Error using parseOptions
Too many output arguments.
Error in lsqlin (line 170)
[options, optimgetFlag] = parseOptions(options, 'lsqlin', defaultopt);
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
The reason for the error is seemingly because, in recent Matlab, lsqlin now depends on a utility function parseOptions, which is shadowed by one of my personal functions sharing the same name:
C:\Users\MWJ12\Documents\mwjtree\misc\parseOptions.m
C:\Program Files\MATLAB\R2024b\toolbox\shared\optimlib\parseOptions.m % Shadowed
The MathWorks-supplied version of parseOptions is undocumented, and so is seemingly not meant for use outside of MathWorks. Shouldn't it be standard MathWorks practice to put these utilities in a private\ folder where they cannot conflict with user-supplied functions of the same name?
It is going to be an enormous headache for me to now go and rename all calls to my version of parseOptions. It is a function I have been using for a long time and permeates my code.
General observations on practical implementation issues regarding add-on versioning
I am making updates to one of my File Exchange add-ons, and the updates will require an updated version of another add-on. The state of versioning for add-ons seems to be a bit of a mess.
First, there are several sources of truth for an add-on’s version:
- The GitHub release version, which gets mirrored to the File Exchange version
- The ToolboxVersion property of toolboxOptions (for an add-on packaged as a toolbox)
- The version in the Contents.m file (if there is one)
Then, there is the question of how to check the version of an installed add-on. You can call matlab.addon.installedAddons, which returns a table. Then you need to inspect the table to see if a particular add-on is present, if it is enabled, and get the version number.
If you can get the version number this way, then you need some code to compare two semantic version numbers (of the form “3.1.4”). I’m not aware of a documented MATLAB function for this. The verLessThan function takes a toolbox name and a version; it doesn’t help you with comparing two versions.
If add-on files were downloaded directly and added to the MATLAB search path manually, instead of using the .mtlbx installer file, the add-on won’t be listed in the table returned by matlab.addon.installedAddon. You’d have to call ver to get the version number from the Contents.m file (if there is one).
Frankly, I don’t want to write any of this code. It would take too long, be challenging to test, and likely be fragile.
Instead, I think I will write some sort of “capabilities” utility function for the add-on. This function will be used to query the presence of needed capabilities. There will still be a slight coding hassle—the client add-on will need to call the capabilities utility function in a try-catch, because earlier versions of the add-on will not have that utility function.
I also posted this over at Harmonic Notes
Have you ever wanted to search for a community member but didn't know where to start? Or perhaps you knew where to search but couldn't find enough information from the results? You're not alone. Many community users have shared this frustration with us. That's why the community team is excited to introduce the new ‘People’ page to address this need.
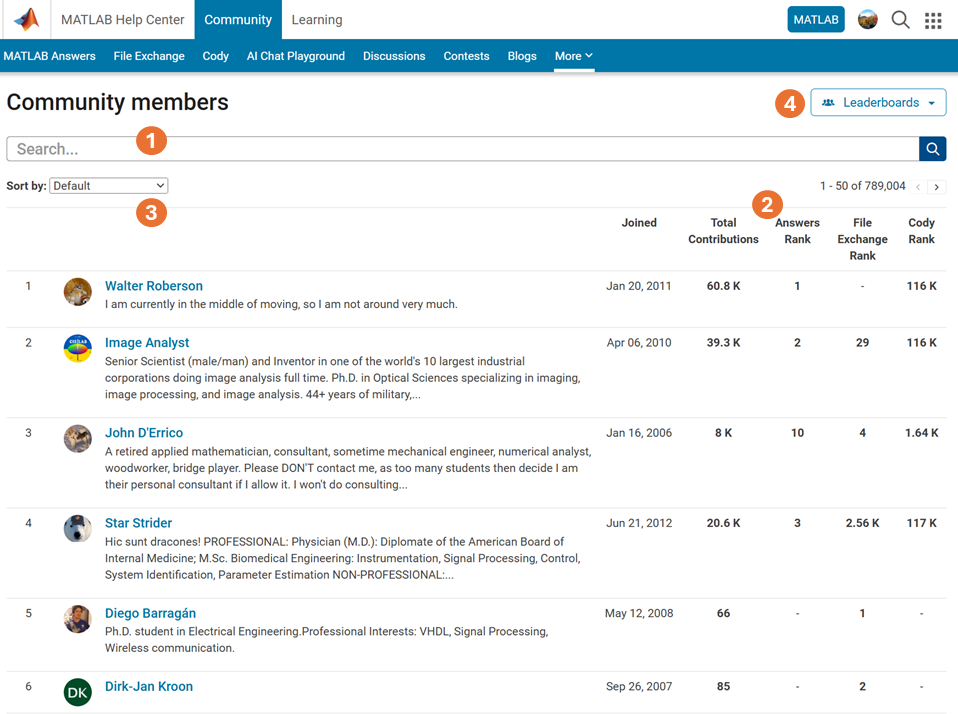
What Does the ‘People’ Page Offer?
- Comprehensive User Search: Search for users across different applications seamlessly.
- Detailed User Information: View a list of community members along with additional details such as their join date, rankings, and total contributions.
- Sorting Options: Use the ‘sort by’ filter located below the search bar to organize the list according to your preferences.
- Easy Navigation: Access the Answers, File Exchange, and Cody Leaderboard by clicking the ‘Leaderboards’ button in the upper right corner.
In summary, the ‘People’ page provides a gateway to search for individuals and gain deeper insights into the community.
How Can You Access It?
Navigate to the global menu, click on the ‘More’ link, and you’ll find the ‘People’ option.
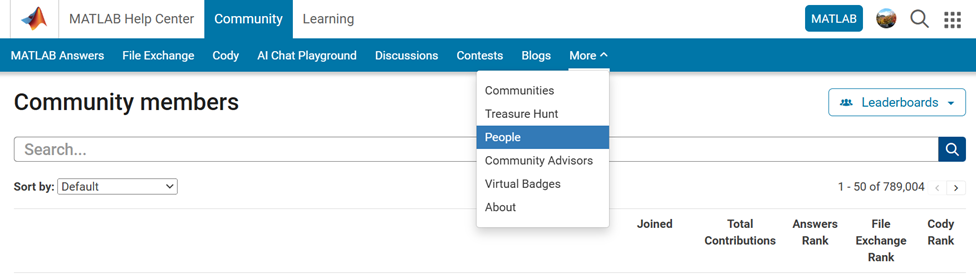
Now you know where to go if you want to search for a user. We encourage you to give it a try and share your feedback with us.
Los invito a conocer el libro "Sistemas dinámicos en contexto: Modelación matemática, simulación, estimación y control con MATLAB", el cual ya está disponible en formato digital.
El libro integra diversos temas de los sistemas dinámicos desde un punto de vista práctico utilizando programas de MATLAB y simulaciones en Simulink y utilizando métodos numéricos (ver enlace). Existe mucho material en el blog del libro con posibilidades para comentarios, propuestas y correcciones. Resalto los casos de estudio
Creo que el libro les puede dar un buen panorama del área con la posibilidad de experimentar de manera interactiva con todo el material de MATLAB disponible en formato Live Script. Lo mejor es que se pueden formular preguntas en el blog y hacer propuestas al autor de ejercicios resueltos.
Son bienvenidos los comentarios, sugerencias y correcciones al texto.
I got thoroughly nerd-sniped by this xkcd, leading me to wonder if you can use MATLAB to figure out the dice roll for any given (rational) probability. Well, obviously you can. The question is how. Answer: lots of permutation calculations and convolutions.
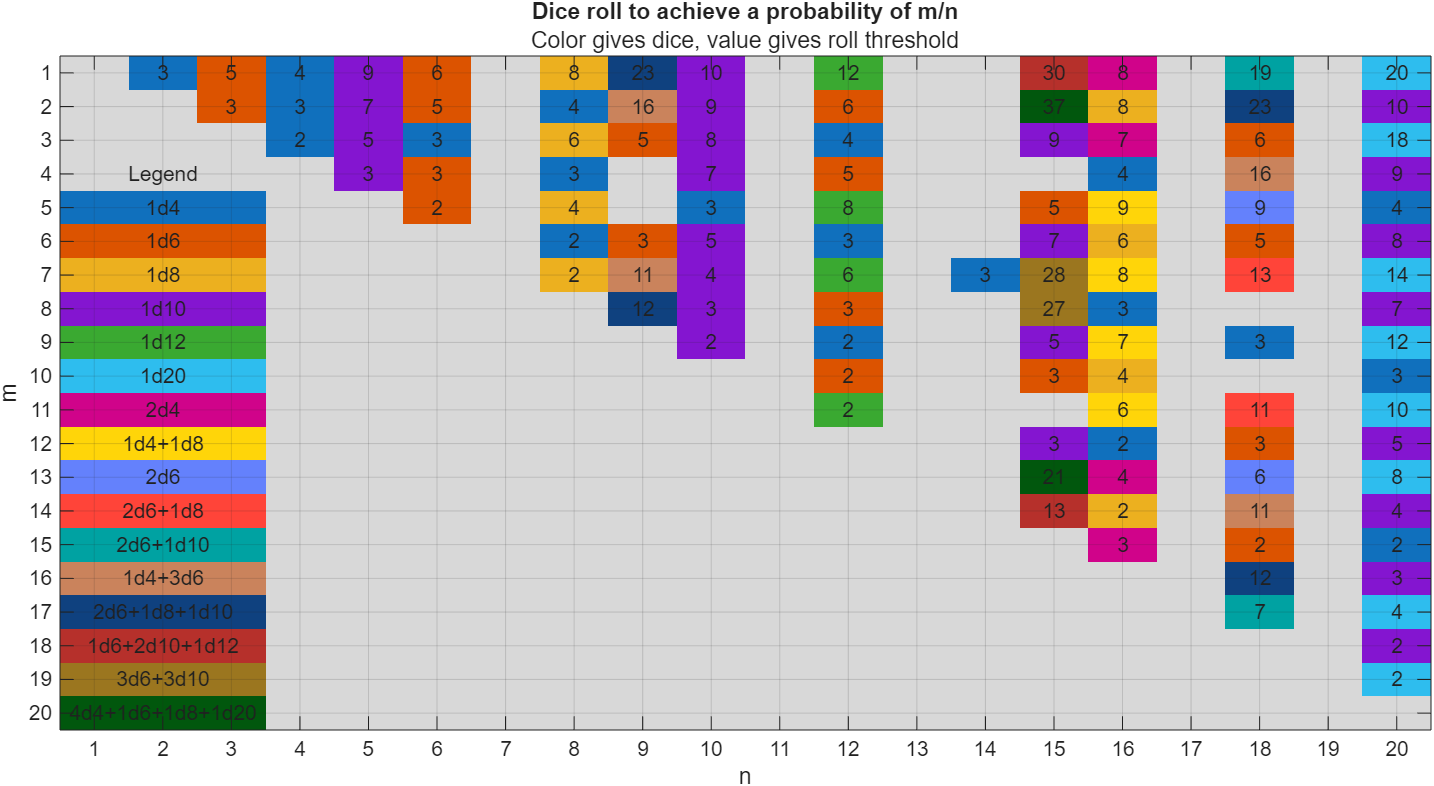
In the original xkcd, the situation described by the player has a probability of 2/9. Looking up the plot, row 2 column 9, shows that you need 16 or greater on (from the legend) 1d4+3d6, just as claimed.
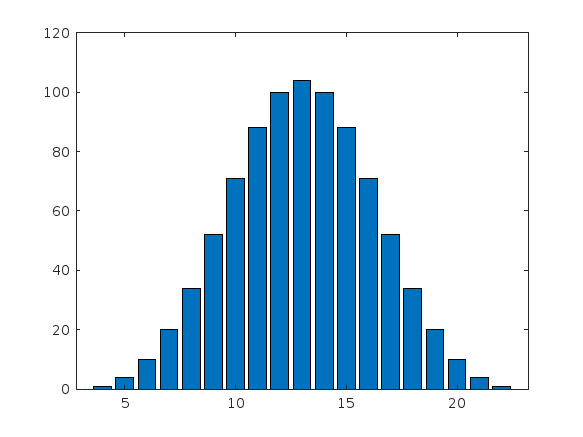
If you missed the bit about convolutions, this is a super-neat trick
[v,c] = dicedist([4 6 6 6]);
bar(v,c)
% Probability distribution of dice given by d
function [vals,counts] = dicedist(d)
% d is a vector of number of sides
n = numel(d); % number of dice
% Use convolution to count the number of ways to get each roll value
counts = 1;
for k = 1:n
counts = conv(counts,ones(1,d(k)));
end
% Possible values range from n to sum(d)
maxtot = sum(d);
vals = n:maxtot;
end
I have already created a 8-DOF electric vehicle model in MATLAB and during the verification method, I noticed that the roll angle does not really align with the data from CarMaker. I would like to seek for the oppinion from this community on how to improve the graph that I have obtained. I have also attatched the parameters of this vehicle as well as the graph that I have obtained. The blue plots indicates the data from a real world based electric model from CarMaker and yellow is from the 8-DOF model in matlab.
these are the vehicle parameters
data.g = 9.81; % [m/s^2] acceleration of gravity
data.f_res = 1.1e-2; % [-] rolling friction parameter
data.k_res = 6.5e-7; % [s^2/m^2] rolling friction coefficient
data.rho = 1.205; % [kg/m^3] air density
data.area = 2.156; % [m^2] cross section
data.cx = 0.30; % [-] drag coefficient
data.mass = 2200.10; % [kg] total vehicle mass
data.Jx = 552.75; % [kg*m^2] roll-axis inertia
data.Jz = 3002.5; % [kg*m^2] yaw-axis inertia
data.Jw = 2; % [kg*m^2] spin-axis inertia of wheel
data.radius = 0.3401; % [m] wheel radius
% Reduced Pacejka tyre model data
data.tyre_par(1) = 82.8868; % Pacejka coeff.
data.tyre_par(2) = 1.2070; % Pacejka coeff.
data.tyre_par(3) = 1.1351; % Pacejka coeff.
data.tyre_par(4) = 14.4035; % Pacejka coeff.
data.tyre_par(5) = 1.1932; % Pacejka coeff.
data.tyre_par(6) = -0.0001; % Pacejka coeff.
data.tyre_par(7) = 2.1219; % Pacejka coeff.
% Pacejka 5.2 tyre model data
tyre = ImportTyreData('.', 'Tyre_VSM.tir');
tyre = rmfield(tyre, 'file');
data.tyre_par_full = tyre;
data.wbase_f = 1.4727; % [m] front wheelbase
data.wbase_r = 1.4553; % [m] rear wheelbase
data.wbase = data.wbase_f + data.wbase_r; % [m] wheelbase
data.track = 1.655; % [m] track
data.h_cg = 0.631; % [m] centre of gravity height from ground
data.h_roll = 0.091; % [m] roll centre height from ground
data.k_roll_f = 8.67e4; % [Nm] roll stiffness at front
data.k_roll_r = 7.80e4; % [Nm] roll stiffness at rear
data.c_roll_f = 1.2e6; % [Nm/s] roll damping at front
data.c_roll_r = 6e5; % [Nm/s] roll damping at rear
data.k_act_roll = 0.9; % [-] active anti-roll coefficient
data.em_curve = [ % electric motor torque-speed curve
0, 900, 1000, 1100, 1200, 1300 % [RPM]
1500, 1500, 1400, 1000, 500, 0 % [Nm]
];
data.torque_bk_lb = -5e3; % [Nm] minimum brake torque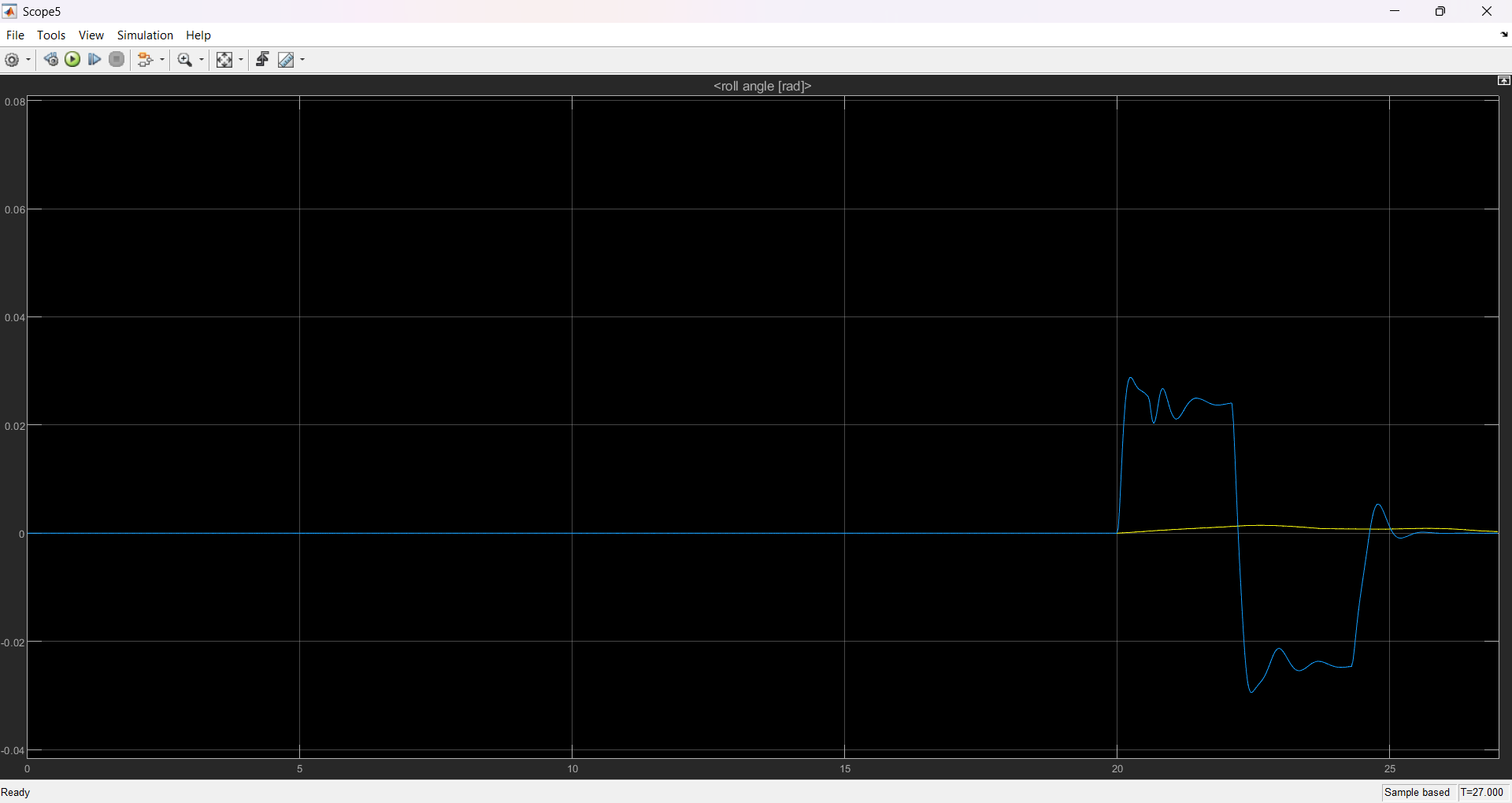
I am very pleased to share my book, with coauthors Professor Richard Davis and Associate Professor Sam Toan, titled "Chemical Engineering Analysis and Optimization Using MATLAB" published by Wiley: https://www.wiley.com/en-us/Chemical+Engineering+Analysis+and+Optimization+Using+MATLAB-p-9781394205363
Also in The MathWorks Book Program:
Chemical Engineering Analysis and Optimization Using MATLAB® introduces cutting-edge, highly in-demand skills in computer-aided design and optimization. With a focus on chemical engineering analysis, the book uses the MATLAB platform to develop reader skills in programming, modeling, and more. It provides an overview of some of the most essential tools in modern engineering design.
Chemical Engineering Analysis and Optimization Using MATLAB® readers will also find:
- Case studies for developing specific skills in MATLAB and beyond
- Examples of code both within the text and on a companion website
- End-of-chapter problems with an accompanying solutions manual for instructors
This textbook is ideal for advanced undergraduate and graduate students in chemical engineering and related disciplines, as well as professionals with backgrounds in engineering design.
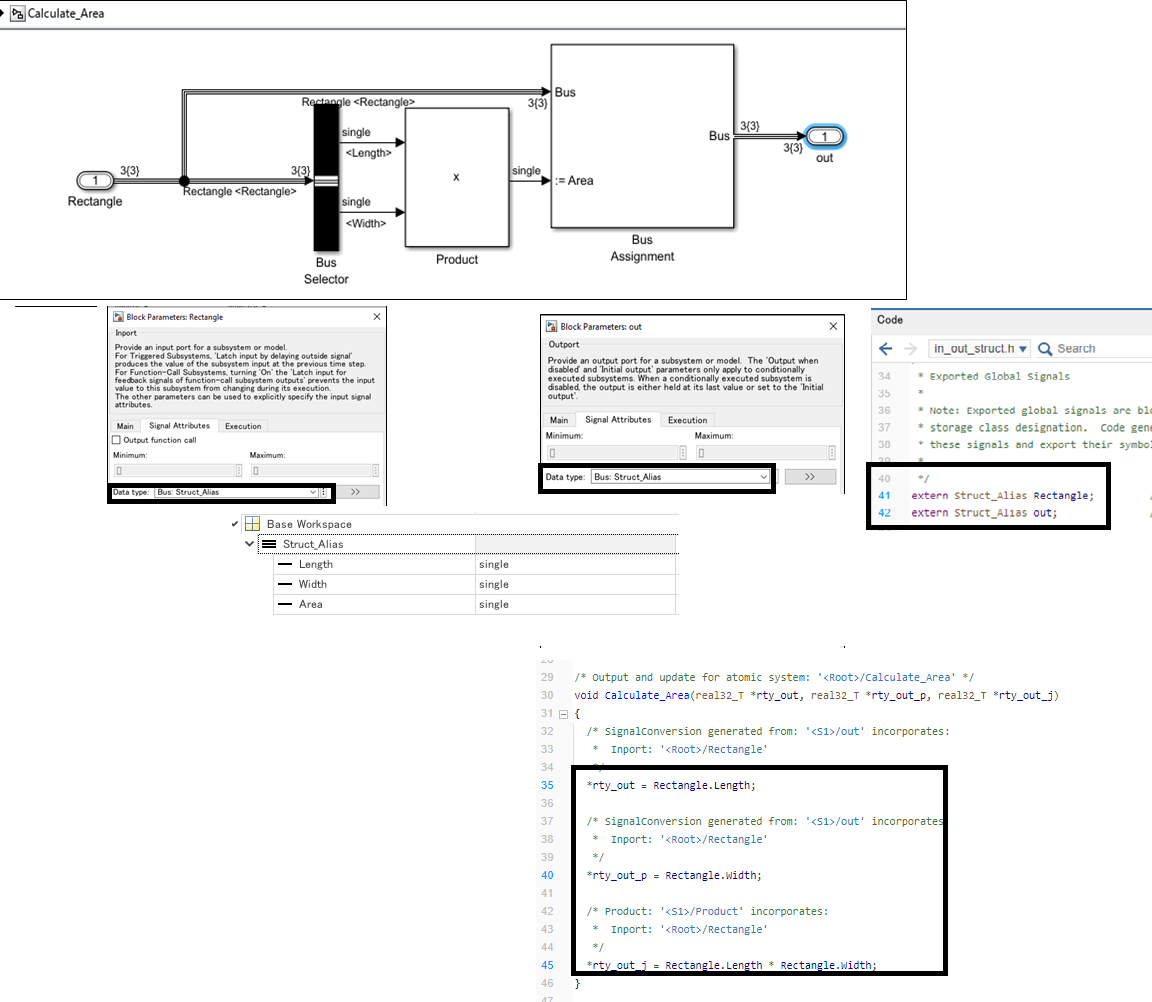
My intention is to generate th code as mentioned below
void computeArea() {
rectangle.area = rectangle.length * rectangle.width;
}