このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
Visual SLAM と structure from motion
ステレオ ビジョンは、同じシーンの 2 つ以上のビューを比較することによりカメラ イメージから深度を復元するプロセスです。structure from motion (SfM) は、一連の 2 次元イメージから 3 次元シーンの構造を推定するプロセスです。Visual simultaneous localization and mapping (vSLAM) とは、環境地図作成を行うのと同時に、周囲に対するカメラの位置と向きを計算する処理のことです。Visual-inertial SLAM (viSLAM) は、カメラからの視覚的入力と IMU の位置データを融合させて SLAM の結果を改善するプロセスです。詳細については、MATLAB での Visual SLAM の実装およびstructure from motion とはを参照してください。
カテゴリ
- ステレオ ビジョン
ステレオ平行化、視差および高密度 3 次元再構成
- vSLAM
単眼、ステレオ、RGB-D の Visual simultaneous localization and mapping (vSLAM)、およびビジュアル慣性センサー フュージョン
- structure from motion
複数のビューからの 3 次元再構成
注目の例

Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code.

Augmented Reality Using AprilTag Markers
Use marker-based augmented reality to render virtual content into a scene.

Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.
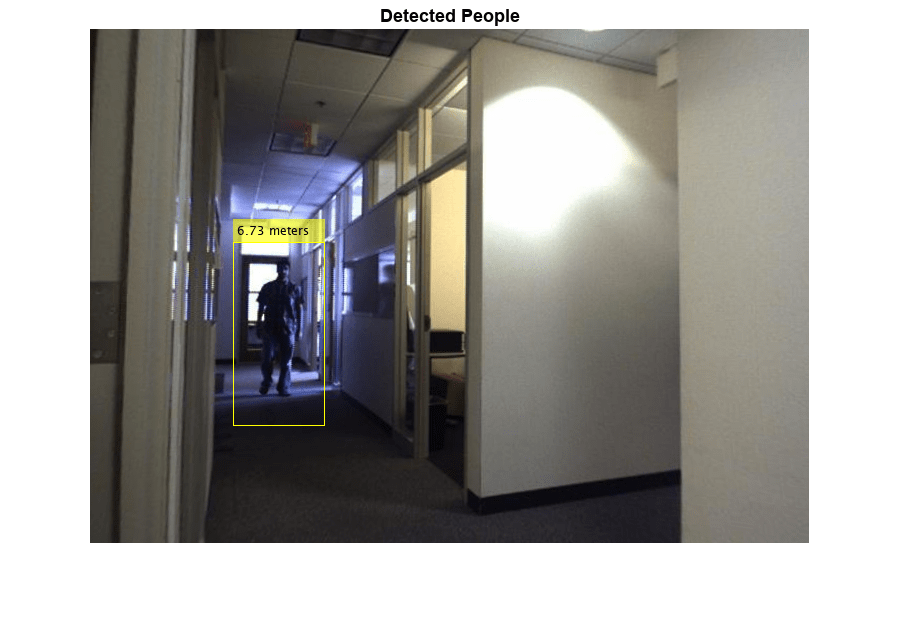
ステレオ ビデオからの深度推定
キャリブレートされたステレオ カメラで撮影したビデオに映っている人物を検出し、カメラとの距離を判定する。

キャリブレーションされていないステレオイメージの平行化
2 つのキャリブレーションされていないイメージの平行化の計算。

Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data obtained from the Unreal Engine® simulation environment.
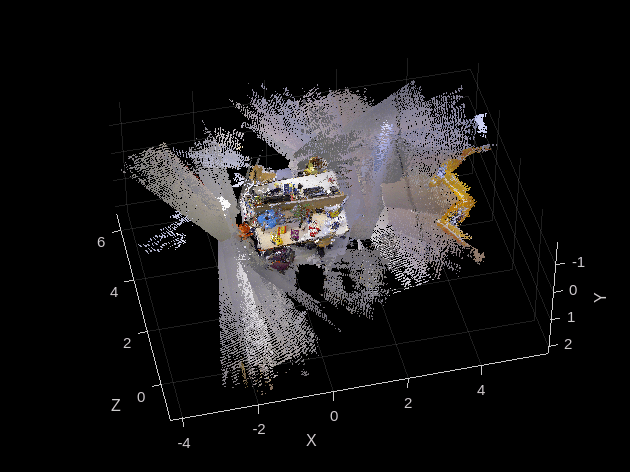
RGB-D カメラでの Visual SLAM
RGB-D イメージ データを処理して、屋内環境マップを作成し、カメラの軌跡を推定する。

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Perform monocular visual-inertial odometry using tightly coupled factor graph optimization.