Deep Learning Object Detector
ライブラリ:
Computer Vision Toolbox /
Analysis & Enhancement
説明
Deep Learning Object Detector ブロックは、ブロック パラメーターで指定された学習済みオブジェクト検出器を使用して、入力イメージの境界ボックス、クラス ラベル、およびスコアを予測します。このブロックを使用すると、事前学習済みのオブジェクト検出器を MAT ファイルまたは MATLAB® 関数から Simulink® モデルに読み込むことができます。このブロックは、Simulink で検出器オブジェクトを使用するためのグラフィカル インターフェイスを提供します。Deep Learning Object Detector ブロックの一部のパラメーターを有効にするには、それらのパラメーターをサポートするオブジェクト検出器を選択しなければなりません。たとえば、このブロックで yolov2ObjectDetector オブジェクトを使用すると、関連付けられたオブジェクト関数 detect の名前と値の引数に類似したパラメーターを選択できます。
例

深層学習を使用した Simulink での車線検出と車両検出
この例では、Simulink® モデル内で深層畳み込みニューラル ネットワークを使用して、車線検出と車両検出を実行する方法を示します。この例では、交通量ビデオのフレームを入力として受け取り、自車の左右の車線に対応する 2 つの車線境界線を出力し、フレーム内の車両を検出します。
端子
入力
出力
入力イメージ内で検出されたオブジェクトの位置。M 行 4 列または M 行 5 列の行列として返されます。M は、イメージ内で検出された境界ボックスの数です。[最大検出数] パラメーターを指定することで、サイズ M に上限を設定できます。
次の表は、境界ボックスの形式について説明しています。
| 境界ボックス | Description |
|---|---|
軸に平行な四角形 | [x y w h] 形式の行をもつ M 行 4 列の数値行列として、空間座標で定義します。ここで、
|
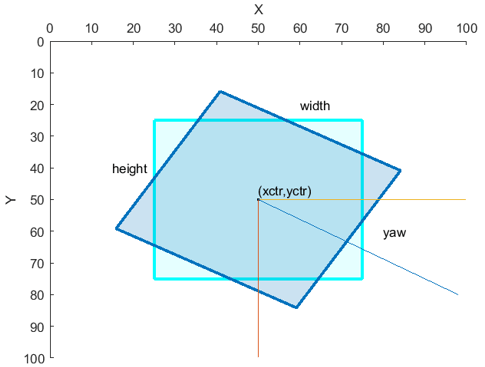
回転した四角形 | [xctr yctr w h yaw] 形式の行をもつ M 行 5 列の数値行列として、空間座標で定義します。ここで、
|
詳細については、深層学習用のデータストア (Deep Learning Toolbox)を参照してください。
境界ボックスのラベル。M 行 1 列の列挙ベクトルとして返されます。M は、イメージ内で検出された境界ボックスの数です。
各ラベルの検出信頼度スコア。M 行 1 列のベクトルとして返されます。M は、イメージ内で検出された境界ボックスの数です。スコアが高いほど、検出の信頼度が高いことを示します。