このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
uavScenario
UAV シミュレーション シナリオの生成
説明
uavScenario オブジェクトは、3-D 環境内の固定メッシュ、UAV プラットフォーム、およびセンサーで構成されるシミュレーション シナリオを生成します。
作成
scene = uavScenario は、既定のプロパティ値をもつ空の UAV シナリオを作成します。既定の慣性座標系は、北-東-下 (NED) 座標系と東-北-上 (ENU) 座標系です。
scene = uavScenario( は、1 つ以上の Name,Value)Name,Value のペアの引数を使用して、プロパティをもつ uavScenario オブジェクトを構成します。Name はプロパティ名で、Value は対応する値です。Name は引用符で囲む必要があります。名前と値のペアの引数を複数、任意の順序で、Name1,Value1,...,NameN,ValueN のように指定できます。指定されていないプロパティはすべて既定値を取ります。
この構文を使用して、UpdateRate、StopTime、HistoryBufferSize、ReferenceLocation、および MaxNumFrames の各プロパティを指定できます。uavScenario オブジェクトのその他のプロパティは指定できず、読み取り専用です。
プロパティ
オブジェクト関数
setup | Prepare UAV scenario for simulation |
addCustomTerrain | Add custom terrain data |
addMesh | Add new static mesh to UAV scenario |
addInertialFrame | Define new inertial frame in UAV scenario |
advance | Advance UAV scenario simulation by one time step |
copy | Copy UAV scenario |
updateSensors | Update sensor readings in UAV scenario |
removeCustomTerrain | Remove custom terrain data |
restart | Reset simulation of UAV scenario |
show | Visualize UAV scenario in 2-D |
show3D | Visualize UAV scenario in 3-D |
terrainHeight | Returns terrain height in UAV scenarios |
targetPoses | Find positions, orientations, velocities, angular velocities, and accelerations of targets relative to ego UAV platform |
例
UAV シナリオを作成し、そのローカル原点を設定します。
scene = uavScenario("UpdateRate",200,"StopTime",2,"ReferenceLocation",[46, 42, 0]);
MAP という慣性座標系をシナリオに追加します。
scene.addInertialFrame("ENU","MAP",trvec2tform([1 0 0]));
シナリオに地面メッシュを 1 つ、円柱の障害物メッシュを 2 つ追加します。
scene.addMesh("Polygon", {[-100 0; 100 0; 100 100; -100 100],[-5 0]},[0.3 0.3 0.3]); scene.addMesh("Cylinder", {[20 10 10],[0 30]}, [0 1 0]); scene.addMesh("Cylinder", {[46 42 5],[0 20]}, [0 1 0], "UseLatLon", true);
シナリオ内に、指定されたウェイポイント軌跡をもつ UAV プラットフォームを作成します。UAV プラットフォームのメッシュを定義します。
traj = waypointTrajectory("Waypoints", [0 -20 -5; 20 -20 -5; 20 0 -5],"TimeOfArrival",[0 1 2]); uavPlat = uavPlatform("UAV",scene,"Trajectory",traj); updateMesh(uavPlat,"quadrotor", {4}, [1 0 0],eul2tform([0 0 pi])); addGeoFence(uavPlat,"Polygon", {[-50 0; 50 0; 50 50; -50 50],[0 100]},true,"ReferenceFrame","ENU");
UAV プラットフォームの前部に INS センサーを取り付けます。
insModel = insSensor(); ins = uavSensor("INS",uavPlat,insModel,"MountingLocation",[4 0 0]);
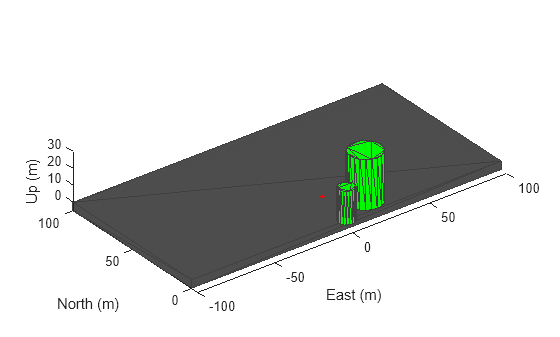
3-D でシナリオを可視化します。
ax = show3D(scene);
axis(ax,"equal"); シナリオのシミュレーションを実行します。
setup(scene); while advance(scene) % Update sensor readings updateSensors(scene); % Visualize the scenario show3D(scene,"Parent",ax,"FastUpdate",true); drawnow limitrate end
この例では、UAV シナリオに地形とカスタムの建物メッシュを追加する方法を説明します。
地形表面の追加
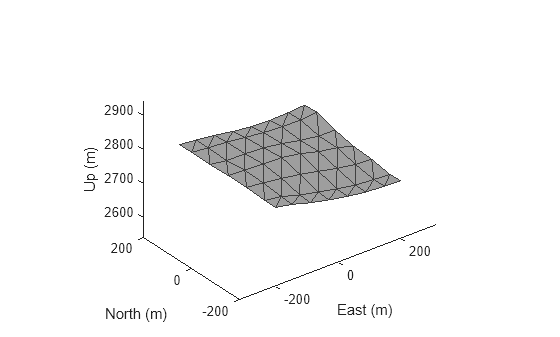
n39_w106_3arc_v2.dt1 DTED ファイルの地形標高データに基づく地形表面を追加します。
addCustomTerrain("CustomTerrain","n39_w106_3arc_v2.dt1"); scenario = uavScenario("ReferenceLocation", [39.5 -105.5 0]); addMesh(scenario,"terrain", {"CustomTerrain", [-200 200], [-200 200]}, [0.6 0.6 0.6]); show3D(scenario);
建物の追加
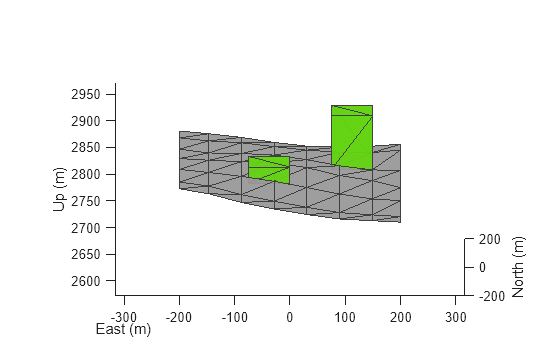
頂点とポリゴン メッシュを使用して、2 棟のカスタム建物をシナリオに追加します。各建物の底面の標高を取得するには、関数terrainHeightを使用します。
buildingCenters = [-50, -50; 100 100]; buildingHeights = [30 100]; buildingBoundary = [-25 -25; -25 50; 50 50; 50 -25]; for idx = 1:size(buildingCenters,1) buildingVertices = buildingBoundary+buildingCenters(idx,:); buildingBase = min(terrainHeight(scenario,buildingVertices(:,1),buildingVertices(:,2))); addMesh(scenario,"polygon", {buildingVertices, buildingBase+[0 buildingHeights(idx)]}, [0.3922 0.8314 0.0745]); end show3D(scenario); view([0 15])
カスタム地形の削除
インポートしたカスタム地形を削除します。
removeCustomTerrain("CustomTerrain")バージョン履歴
R2020b で導入