addMesh
Add new static mesh to UAV scenario
Description
addMesh(___, specifies
additional options using name-value arguments.Name=Value)
Examples
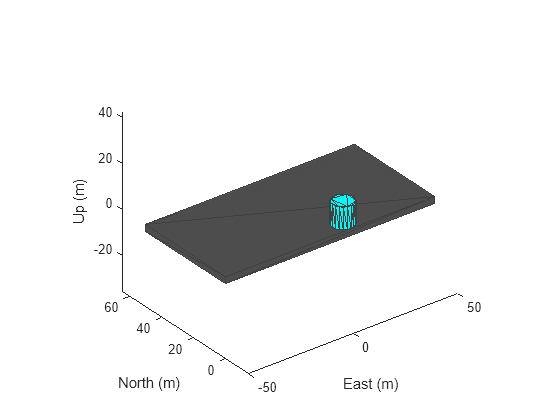
Create a UAV Scenario.
scene = uavScenario("UpdateRate",100,"StopTime",1);
Add the ground and a building as meshes.
addMesh(scene,"Polygon", {[-50 0; 50 0; 50 50; -50 50], [-3 0]}, [0.3 0.3 0.3]); addMesh(scene,"Cylinder", {[10 5 5], [0 10]}, [0 1 1]);
Visualize the scenario.
show3D(scene);
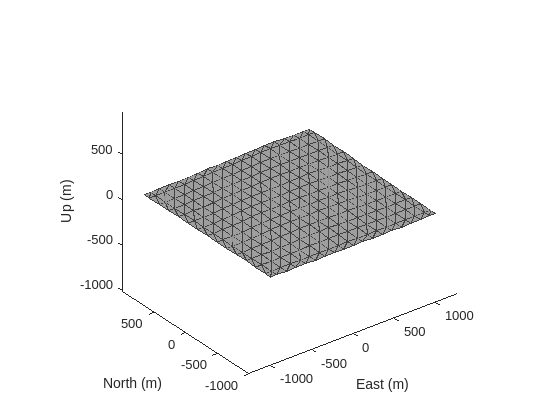
Create a UAV scenario centered on New York City, and add a terrain mesh based on the Global Multi-Resolution Terrain Elevation Data (GMTED2010) data set.
scene = uavScenario(ReferenceLocation=[40.707088 -74.012146 0]); xlimits = [-1000 1000]; ylimits = [-1000 1000]; color = [0.6 0.6 0.6]; terrainInfo = addMesh(scene,"terrain",{"gmted2010",xlimits,ylimits},color,Verbose=true)
terrainInfo = struct with fields:
TerrainName: "gmted2010"
LatitudeRange: [-90 90]
LongitudeRange: [-180 180]
show3D(scene);
Add buildings by importing them from an OSM file that contains the buildings of Manhattan, manhattan.osm.[1]
xlimits = [-800 800]; ylimits = [-800 800]; color = [0 1 0]; osmInfo = addMesh(scene,"buildings",{"manhattan.osm",xlimits,ylimits,"auto"},color,Verbose=true)
osmInfo = struct with fields:
OSMFileName: "/mathworks/devel/sbs/25/rprasad.Bdoc23a.j2033780.Aug12/matlab/toolbox/shared/openstreetmapdata/manhattan.osm"
LatitudeRange: [40.7010 40.7182]
LongitudeRange: [-74.0188 -74.0003]
TotalNumBuildings: 836
NumImportedBuildings: 657
show3D(scene);

[1] The file was downloaded from https://www.openstreetmap.org, which provides access to crowd-sourced map data all over the world. The data is licensed under the Open Data Commons Open Database License (ODbL), https://opendatacommons.org/licenses/odbl/.
Create a default UAV scenario.
scene = uavScenario;
Create a triangulation object from STL file.
stltri = stlread("multirotor.stl");Add a static mesh to the scenario, using the triangulation object as the input.
addMesh(scene,"custom",{stltri.Points stltri.ConnectivityList},[0.6350 0.0780 0.1840])Show the scene.
ax = show3D(scene); p = findobj(ax,"type","patch"); p.LineStyle = "none";

Input Arguments
Name-Value Arguments
Output Arguments
Tips
OSM files may load slowly when a high number of buildings are specified in the file. If you experience long load times, consider reducing the number of buildings to load more quickly.
Version History
Introduced in R2020bSee Also
uavScenario | addCustomTerrain | removeCustomTerrain | terrainHeight