このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
DC-DC降圧コンバータの閉ループ制御
この例では、C2000™ Microcontroller Blockset 内の DC-DC 降圧コンバータの閉ループ制御をモデル化する方法を示します。このモデルは、C2000 デジタル電源ブースター パックに接続された F28379D Launchpad で動作します。
この例を使用すると、次のものをモデル化できます。
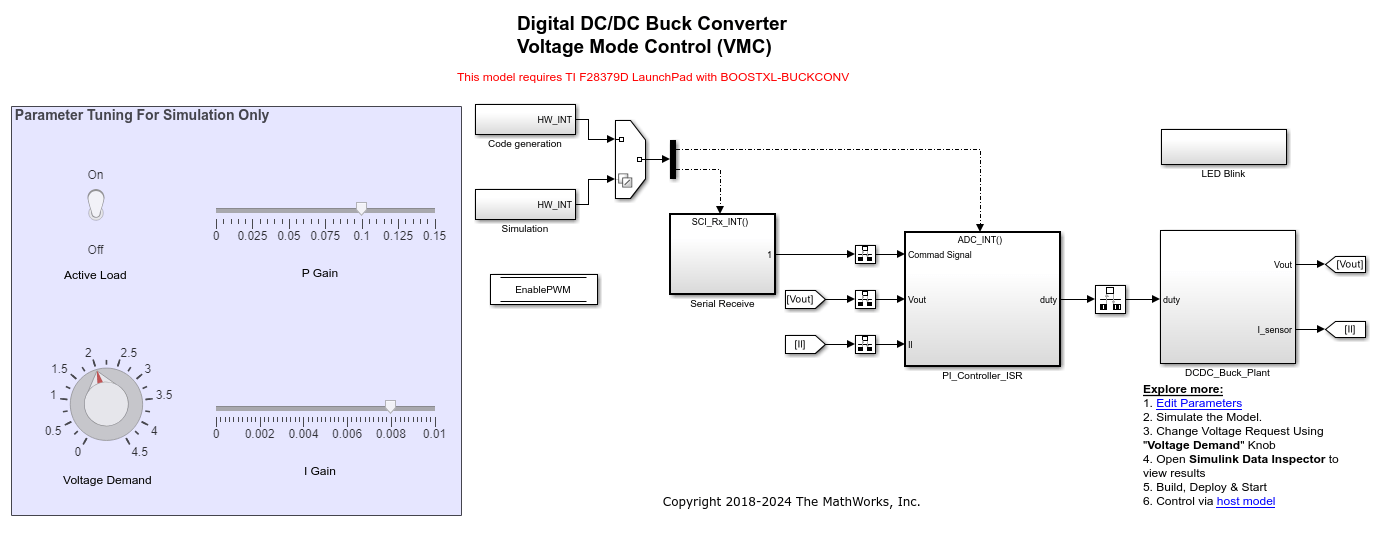
デジタル DC-DC 同期降圧コンバータの電圧モード制御 (VMC)。
制御補償器アクセラレータ(CLA) を使用したデジタル DC-DC 同期降圧コンバータの平均電流モード制御。
この例で提供されているモデルをホスト コンピューターで実行すると、次のことが可能になります。
DC-DC 降圧コンバータプラントモデルのコントローラーをシミュレートします。
コントローラーのコードを生成し、 LaunchPadにロードします。
ホスト コンピュータ上で信号を監視し、パラメーターを調整します。
必要なハードウェア
F28379D LaunchPad または F28P650D LaunchPad (付録 9.1 に記載されているように、 LaunchPadスタイルのパススルー ソケット ストリップ コネクタ が必要です)。
ハードウェアの接続
次の表に示すように、デジタル電源降圧コンバータ BoosterPack (BOOSTXL-BUCKCONV) をTexas Instruments Delfino F28379D LaunchPadまたはTexas Instruments F28P650D LaunchPadに接続します。

利用可能なモデル
ターゲット モデルを使用すると、コントローラーをシミュレートし、コードを生成して必要なターゲットにロードできます。ホスト モデルをホスト コンピューター上で実行して、信号を記録し、パラメーターを調整できます。
F28379DLaunchPad
対象モデル:
ホストモデル:
F28P650DLaunchPad
対象モデル:
ホストモデル:
これらのモデルは、シミュレーションとコード生成の両方に使用できます。
f28379D_DCDC_Buck.slx および f28379D_DCDC_Buck_CLA.slx モデルは、次のサブシステムで構成されています。
コントローラー:
電圧モード制御 - f28379D_DCDC_Buck.slx モデルは、離散比例積分 (PI) コントローラを使用して、基準電圧と出力電圧間の誤差を最小限に抑えます。PI コントローラのデューティ サイクルは、PWM 時間周期の 60% に制限されます。
平均電流モード制御 - f28379D_DCDC_Buck_CLA.slx モデルは、離散比例積分 (PI) コントローラを使用して、デューティ サイクルを生成する平均インダクタ電流を制御します。電流コントローラの基準値は、電圧コントローラの出力です。
DC-DC 降圧コンバータ:Simscape ™ ブロックは、DC-DC 降圧コンバータ回路をモデル化するために使用されます。
ダッシュボード コントロール:基準電圧の設定、アクティブ負荷のオン/オフの切り替え、比例ゲインと積分ゲインの調整に使用されます。
周辺装置ブロックの構成
このモデルのペリフェラル ブロック構成を設定します。ブロックをダブルクリックして、ブロックパラメーター構成を開きます。この例を他のハードウェアボードで実行する場合には、同じパラメーター値を使用できます。示されているペリフェラル ブロック構成は、f28379D_DCDC_Buck_CLA.slx モデルのものです。
ePWMブロック
ePWMブロック (PI_Controller_ISR > コード生成> PI アルゴリズム) は アップダウン モードで動作するように構成されており、 ePWMカウンターがタイマー期間に達するとADCの変換の開始をトリガーします。

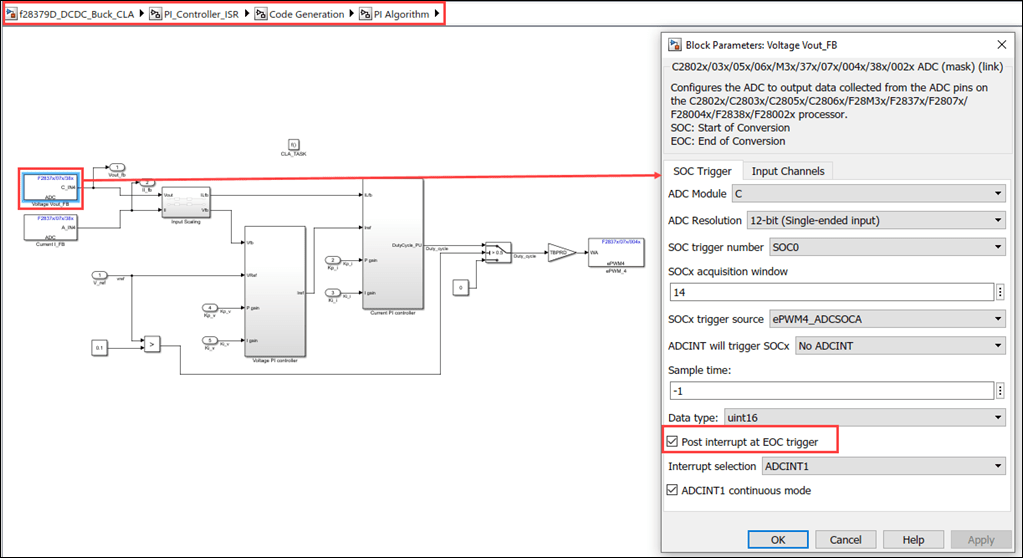
ADCブロック
ADCブロック (PI_Controller_ISR > コード生成> PI アルゴリズム内) は、EOC トリガーでの割り込み後パラメーターが有効に設定されています。
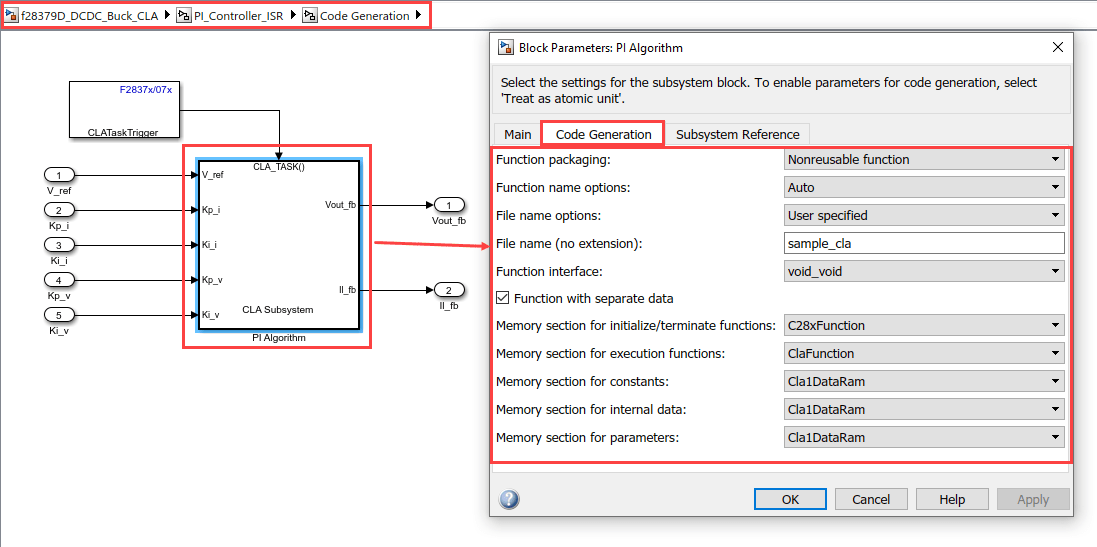
CLA Subsystem ブロック
PI アルゴリズム ブロックへの入力は CpuToCla1MsgRAM に保存されます。CLA 構成は f28379D_DCDC_Buck_CLA.slx モデルにのみ適用されます。詳細については、Overview of CLA Configuration for C2000 Processors Using Subsystem を参照してください。
DC/DC降圧コンバータプラントモデルのコントローラのシミュレーション
モデルの実行
1. f28379D_DCDC_Buck.slx または f28379D_DCDC_Buck_CLA.slx モデルを開きます。
2. [シミュレーション] タブの [実行] をクリックして、モデルをシミュレートします。
3. [シミュレーション] タブの [データ インスペクター] をクリックし、シミュレーション結果を表示して解析します。ダッシュボード コントロールを使用して入力パラメーターを調整できます。
コントローラーのコードを生成し、 LaunchPadにロードする
このセクションでは、コードを生成し、ターゲット ハードウェアにロードします。
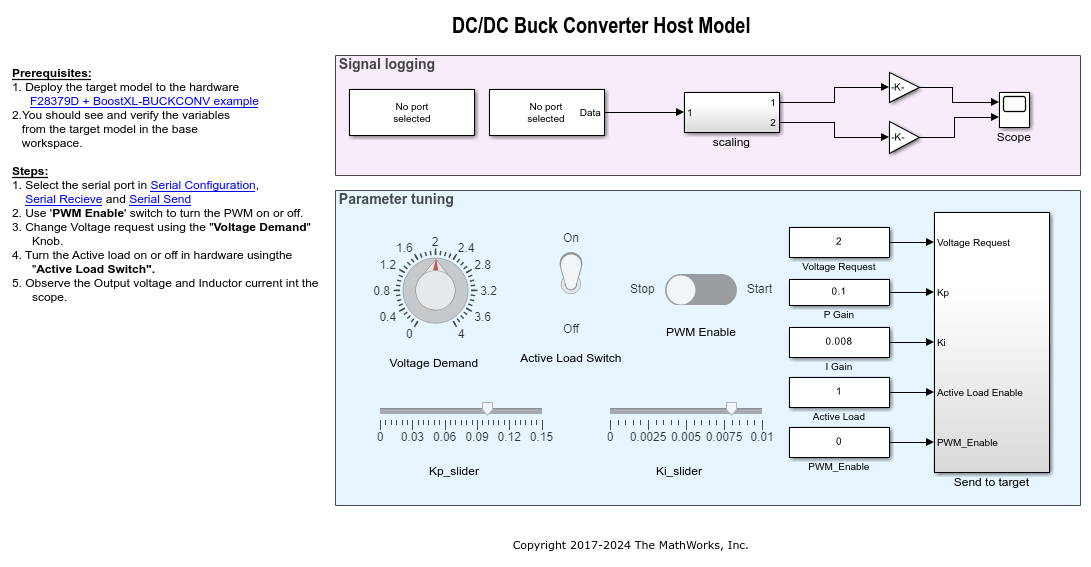
この例ではホストとターゲット モデルを使用します。ホスト モデルはコントローラー ハードウェア ボードへのユーザー インターフェイスです。ホスト モデルはホスト コンピューターで実行できます。ホスト モデルを使用するための前提条件として、コントローラー ハードウェア ボードにターゲット モデルを展開します。ホスト モデルはシリアル通信を使用してターゲットの Simulink ® モデルにコマンドを送信し、閉ループ制御で BoostXL-BUCKCONV を実行します。
LaunchPadでモデルを実行する
1. f28379D_DCDC_Buck.slx または f28379D_DCDC_Buck_CLA.slx モデルを開き、Ctrl+B を押すか、[Hardware] タブの [Build, Deploy & Start] をクリックしてコードを生成し、ターゲット モデルをハードウェアにデプロイします。
メモ: F28379D プロセッサでは、この例は CPU1 で実行されます。CPU2 で実行されているプログラムが、CPU1 で使用されているペリフェラルを使用していないことを確認します。
2. ターゲット モデル内の ホスト モデル ハイパーリンクをクリックして、関連付けられているホスト モデルを開きます。c2000_DCDC_Buck_host_model.slx ホスト モデルを開きます。
ホストコンピュータで信号を監視し、パラメーターを調整する
ホストコンピュータ上でモデルを構成して実行する
1. ホスト コンピューターで、デバイス マネージャー > ポート (COM と LPT) に移動して COM ポートを見つけます。
2. c2000_DCDC_Buck_host_model.slx モデル内の次のブロックのパラメーターPort を、ホスト コンピュータの COM ポートと一致するように設定します。
c2000_DCDC_Buck_host_model > シリアル構成
c2000_DCDC_Buck_host_model > シリアル受信
c2000_DCDC_Buck_host_model > ターゲットに送信 > シリアル送信 > シリアル送信
3. ホスト モデルを実行するには、[シミュレーション] タブの [実行] ボタンをクリックします。
4. モデルの実行中に、電圧需要やコントローラーゲインなどのダッシュボード ブロックを使用してパラメーターを調整できます。
メモ: ホストとターゲットの間で非リアルタイム通信が発生した場合は、Scope ブロックを閉じて、ホスト モデルのシミュレーションを実行してみてください。マシンで同時に他のアプリケーションを実行している場合、Scope ブロック内のデータのアップロードに遅延が発生する可能性があります。
ハードウェアのシリアル接続の使用に関する詳細については、ターゲットハードウェアとのシリアル通信のセットアップ を参照してください。
信号を監視する
モデルの実行中に、スコープで次の信号を監視できます。
電圧 Vout_FB:システムの測定された出力電圧。4095 ADCカウントは 6.0909 V の出力電圧に相当します。
電流 I_FB:インダクタ(L1)を流れるリアルタイムの電流。4095 ADCカウントは 6.8333 A のインダクタ電流に相当します。
パラメーターを調整する
モデルの実行中に、次のダッシュボード ブロックを使用してパラメーターを調整できます。
電圧需要:出力電圧の要求を変更します。このパラメーターは制御ループの主な要求です。コントローラ アルゴリズムは、電圧要求値と測定された出力電圧を比較し、出力電圧を実現するように PWM デューティ サイクルを調整します。
アクティブ負荷スイッチ:このスイッチを使用して、ハードウェア上のアクティブ負荷をオンまたはオフにします。これにより、負荷抵抗器を追加して、負荷回路の急激な変化の影響を調べることができます。
PWM 有効:このスライダーを使用して、同期降圧コンバータの PWM をオンまたはオフにします。
コントローラーゲイン:利用可能な Slider ブロック (Kp_slider と Ki_slider) を使用して、コントローラー ゲイン (Kp 値と Ki 値) を変更します。このパラメーターを変更して、コントローラーの堅牢性を調べることができます。大きく急激な変更はコントローラーの不安定化につながる可能性があります。変更はスムーズに適用してください。
ハードウェアの結果
1. 次の図は、モデル f28379D_DCDC_Buck.slx のハードウェア結果を示しています。出力電圧とインダクタ電流を観察します。電圧要求を1 V から 2 V に変更した場合の影響と、アクティブ負荷を変更した場合の影響も確認できます。

2. 次の図は、モデル f28379D_DCDC_Buck_CLA.slx のハードウェア結果を示しています。出力電圧とインダクタ電流を観察します。電圧要求を1 V から 2 V に変更した場合の影響と、アクティブ負荷を変更した場合の影響も確認できます。

その他の試行
TI Delfino F280049C LaunchPadで例を実行し、結果を分析します。
Kp 値と Ki 値を変更して結果を観察します。