bbdesign
ボックスベーンケン計画
説明
dBB = bbdesign(n,Name=Value)dBB を返します。たとえば、中心点の数やブロックあたりの最大点数を指定できます。
例
4 つの中心点をもつ 3 因子のボックスベーンケン計画を作成します。
dBB = bbdesign(3,Center=4);
計画の最後の 5 つの実行を表示します。
disp(dBB(end-4:end,:))
0 1 1
0 0 0
0 0 0
0 0 0
0 0 0
計画には、計画空間全体での予測の分散のより一様な推定のために、4 つの中心点が含まれています。
plot3 関数を使用して計画を可視化します。
plot3(dBB(:,1),dBB(:,2),dBB(:,3),"ro", ... MarkerFaceColor="b") set(gca,Box="on",BoxStyle="full") axis square equal
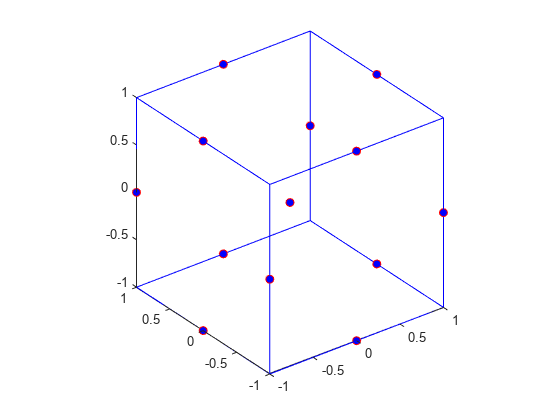
キューブでマークされた各点の座標は、計画における実行の要因設定を表します。
入力引数
名前と値の引数
出力引数
参照
[1] Box, G. E. P., W. G. Hunter, and J. S. Hunter. Statistics for Experimenters. Hoboken, NJ: Wiley-Interscience, 1978.
[2] Box, G. E. P., and D. Behnken. "Some New Three Level Designs for the Study of Quantitative Variables." Technometrics 2, no. 4 (November 1960): 455–75.
バージョン履歴
R2006a より前に導入