衛星の揺れ (Yo-Yo) 制御
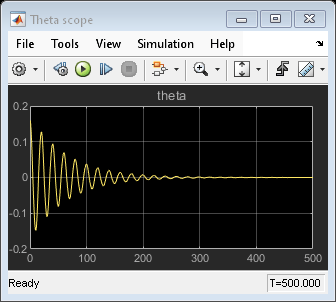
この例では、テザー衛星システムの制御システムをモデル化する方法を示します。この衛星システムは、軌道上のプラットフォームに長いテザーで取り付けられた小さな衛星で構成されています。テザー衛星が振動すると、振子のように動作し、振動が大きくなりすぎます。この振子を安定させるため、制御システムは、衛星がその弧の中間地点にあるときにテザーを最大の長さまで繰り出し (角加速度が低下します)、衛星の角速度がゼロに等しいときにテザーを引き寄せることによって、テザーの長さを変えます。
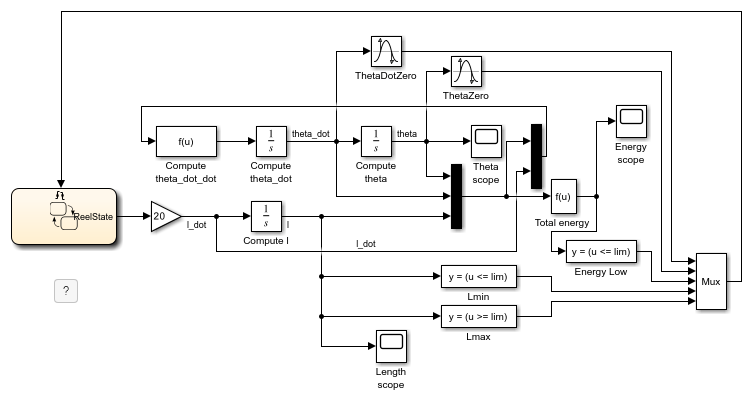
Stateflow® を使用して、Simulink® からの入力イベントによるテザーの繰り出しまたは引き寄せのタイミングを制御します。
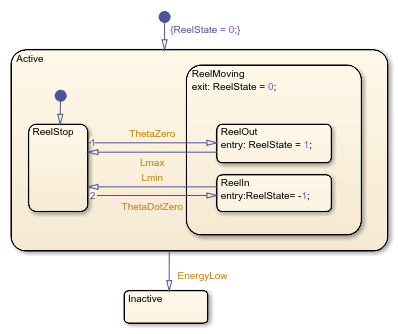
衛星がその弧の中間地点 ( ) にあるときには、ステート
) にあるときには、ステート ReelOut がアクティブになります。限界まで衛星が繰り出されたときには、ステート ReelStop がアクティブになります。衛星の角速度がゼロになると、ReelIn ステートがアクティブになります。テザーを可能な限り短くすると、ReelStop ステートが再度アクティブになります。最後に、衛星の総エネルギーが低すぎると、Inactive ステートに変わり、システムが非アクティブになります。
参照
[1] Dabney, James B. and Harman, Thomas L. Mastering Simulink, 2003.