PMLSM
正弦波の磁束分布をもつ永久磁石線形同期モーター
ライブラリ:
Simscape /
Electrical /
Electromechanical /
Permanent Magnet
説明
PMLSM ブロックは、三相 Y 結線固定子をもつ永久磁石線形同期モーター (PMLSM) をモデル化します。このブロックを使用して、線形同期モーター (LSM) と線形サーボ モーターをモデル化します。次の図は、固定子巻線の等価電気回路を示しています。

[結線種別] を [デルタ結線] に設定して、デルタ結線構成内の永久磁石線形同期モーターをモデル化することもできます。

モーターの構造
次の図はモーターの構造を示しています。

方程式
固定子巻線にかかる電圧は、次のように定義されます。
ここで、
va、vb、および vc は、固定子巻線にかかる個々の相電圧です。
Rs は、各固定子巻線の等価抵抗です。
ia、ib、および ic は、固定子巻線に流れる電流です。
、、および は、各固定子巻線の磁束の変化率です。
永久磁石と 3 本の巻線は、各巻線を鎖交する合計磁束に寄与します。合計磁束は次のように定義されます。
ここで、
ψa、ψb、および ψc は、各固定子巻線を鎖交する合計磁束です。
Laa、Lbb、および Lcc は、固定子巻線の自己インダクタンスです。
Lab、Lac、Lba、Lbc、Lca、および Lcb は、固定子巻線の相互インダクタンスです。
ψam、ψbm、および ψcm は、固定子巻線を鎖交する永久磁石の磁束です。
固定子巻線のインダクタンスは電気角の関数で、次のように定義されます。
および
ここで、
θe は電気角です。
rotor offset は、d 軸に対する回転子の電気角を定義する場合は
0で、q 軸に対する回転子の電気角を定義する場合は-pi/2です。と τ は極のピッチです。
x は距離です。
Ls は固定子の相あたりの自己インダクタンスです。この値は、各固定子巻線の平均自己インダクタンスです。
Lm は固定子のインダクタンス変動です。この値は、角度の変化に伴う自己インダクタンスと相互インダクタンスの変動です。
Ms は固定子の相互インダクタンスです。この値は、固定子巻線間の平均相互インダクタンスです。
巻線 a を鎖交する永久磁石の磁束は、θe = 0° のときに最大になり、θe = 90° のときにゼロになります。したがって、鎖交したモーター磁束は次のように定義されます。
ここで、ψm は永久磁石の鎖交磁束です。
簡易電気方程式
電気方程式に Park 変換を適用すると、角度に依存しない力の式が得られます。
Park 変換は次のように定義されます。
ここで、θe は Npx として定義される電気角です。
固定子巻線の電圧と電流に対して Park 変換を使用すると、その電圧と電流は角度に依存しない dq0 座標系に変換されます。
および
最初の 2 つの電気方程式に Park 変換を適用すると、ブロックの動作を定義する次の方程式が得られます。
および
ここで、
Ld = Ls + Ms + 3/2 Lm。Ld は固定子の d 軸インダクタンスです。
Lq = Ls + Ms − 3/2 Lm。Lq は固定子の q 軸インダクタンスです。
L0 = Ls – 2Ms。L0 は固定子の零相インダクタンスです。
Rs は固定子の相あたりの抵抗です。
v は線形速度です。
Np は極のピッチ係数です。
M はムーバーの質量です。
Bm は減衰です。
FL は負荷力です。
PMLSM ブロックは、Park 変換の元の非直交実装を使用します。代替の実装の適用を試みると、dq0 電圧および電流について異なる結果が得られます。
力の定数 kf、逆起電力定数 ke、および永久磁石の鎖交磁束の関係は次のように定義されます。
熱効果のモデル化
熱端子を表示して、発生する熱とモーターの温度の影響をモデル化できます。熱端子を表示するには、[モデリング オプション] パラメーターを次のどちらかに設定します。
熱端子なし— ブロックには、固定子巻線に関連付けられた展開された電気量保存端子が含まれますが、熱端子は含まれません。熱端子を表示— ブロックには、固定子巻線に関連付けられた展開された電気量保存端子と、各巻線および回転子用の熱保存端子が含まれます。
アクチュエータ ブロックにおける熱端子の使い方の詳細については、回転アクチュエータおよび並進アクチュエータでの熱効果のシミュレーションを参照してください。
変数
シミュレーションの前にブロック変数の優先順位と初期ターゲット値を設定するには、ブロックのダイアログ ボックスまたはプロパティ インスペクターの [初期ターゲット] セクションを使用します。詳細については、ブロック変数の優先順位と初期ターゲットの設定を参照してください。
ノミナル値は、モデル内で予想される変数の大きさを指定する方法を提供します。ノミナル値に基づくシステムのスケーリングを使用すると、シミュレーションのロバスト性が向上します。ノミナル値は、ブロックのダイアログ ボックスまたはプロパティ インスペクターの [ノミナル値] セクションなど、さまざまなソースを使用して指定できます。詳細については、ノミナル値によるシステムのスケーリングを参照してください。
例
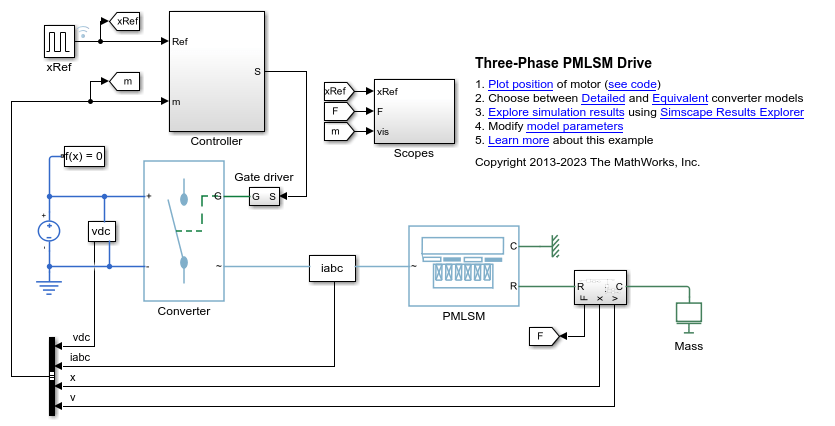
三相 PMLSM 駆動装置
この例では、三相永久磁石線形同期機 (PMLSM) 駆動装置内の位置を制御する方法を説明します。Control サブシステムでは、外側の位置制御ループ、速度制御ループ、内側の 2 つの電流制御ループをもつ PI ベース カスケード制御構造を使用します。制御された三相コンバーターが PMLSM に電力を供給します。シミュレーションではステップ指令値を使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
端子
保存
パラメーター
参照
[1] Kundur, P. Power System Stability and Control. New York, NY: McGraw Hill, 1993.
[2] Anderson, P. M. Analysis of Faulted Power Systems. IEEE Press Power Systems Engineering Series, 1995. ISBN 0-7803-1145-0.
[3] X. Zhang and J. Pan. Nonlinear Robust Sliding Mode Control for PM Linear Synchronous Motors. 2006 CES/IEEE 5th International Power Electronics and Motion Control Conference, Shanghai, 2006, pp. 1–5.