Induction Machine Direct Torque Control with Space Vector Modulator
SVM による誘導機の DTC 構造
ライブラリ:
Simscape /
Electrical /
Control /
Induction Machine Control
説明
Induction Machine Direct Torque Control with Space Vector Modulator は、空間ベクトル変調器 (SVM) による誘導機の直接トルク制御構造 (DTC) を実装します。このブロックを使用して、誘導機を制御するインバーターのゲート パルスを生成します。次のブロック線図は、ブロックのアーキテクチャを示しています。
このブロック線図では、以下のようになります。
指令トルク T* と磁束 ψ* を指定します。
Flux and Torque Estimator は、実際のトルク T と磁束 ψ を測定された相電流 iabc と相電圧 vabc から推定します。
2 つの PI コントローラーは、d と q の基準電圧 vd および vq をそれぞれ磁束とトルクの誤差から求めます。
SVM は、誘導機を駆動するインバーターの制御に必要なゲート パルス Gij を生成します。添字 i は位相 (a、b、または c) に対応します。添字 j は高信号 H または低信号 L に対応します。
Flux and Torque Estimator
トルクと磁束を推定するために、このブロックは静止 ɑβ 基準座標系で後退オイラー法を使用して、マシンの電圧方程式を離散化します。ɑβ 座標系の固定子磁束の離散時間方程式は、次のとおりです。
ここで、
vɑ および vβ は、それぞれ ɑ 軸および β 軸の電圧です。
iɑ および iβ は、それぞれ ɑ 軸および β 軸の電流です。
Ψɑ および Ψβ は、それぞれ ɑ 軸および β 軸の固定子磁束です。
Rs は固定子の抵抗です。
ブロックはトルクと合計固定子磁束を次のように計算します。
ここで、
p は極対数です。
Ψs は合計固定子磁束です。
空間ベクトル変調器
SVM は、目的の電圧を、インバーターの制御に使用するゲート パルスに変換します。次の図は、三相インバーターが取り得るスイッチング状態を示しています。

六角形は空間ベクトル図を表します。6 つの各頂点は、三相インバーターが取り得るスイッチング状態 (GAH,GBH,GCH) を表します。各低ゲートは、対応する高ゲートとして逆の状態を取ります。インバーターの図は、現在の状態を示しています。
空間ベクトル図の回転ベクトルは、マシンの目的の電気周波数で回転する複素数基準電圧ベクトルに対応します。実際には、スイッチング周波数はこの電気周波数よりはるかに高速です。そのため、インバーターは、現在の領域 Ri と (0,0,0) に対応するゼロ状態を含む 2 つの状態の間で継続的に切り替わり、目的の電圧を生成します。
この手法の実装の詳細については、PWM Generator (Three-phase, Two-level) ブロックを参照してください。
例
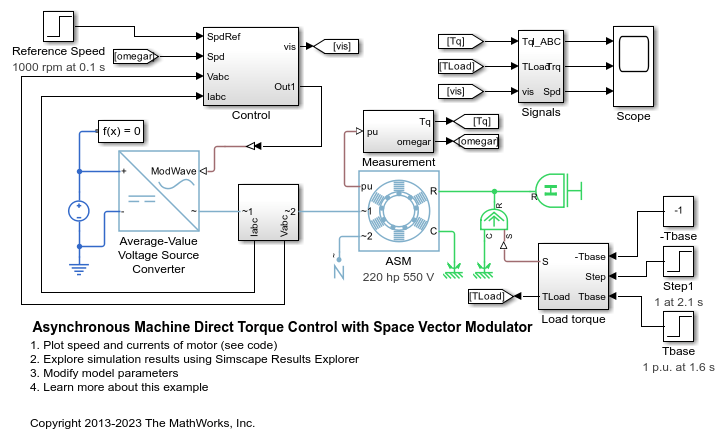
空間ベクトル変調器による非同期機の直接トルク制御
この例では、空間ベクトル変調器で直接トルク制御法を使用して非同期機 (ASM) を制御する方法を説明します。PI ベースの速度コントローラーはトルクの指令値を与えます。直接トルク コントローラーは、空間ベクトル変調器に必要な基準電圧を生成します。DC 電圧源は、制御された平均値電圧源コンバーターを通して ASM に電力を供給します。
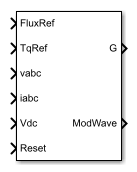
端子
入力
出力
パラメーター
参照
[1] Buja, G. S., and M. P Kazmierkowski. "Direct Torque Control of PWM Inverter-Fed AC Motors—A Survey." IEEE Transactions on Industrial Electronics 51, no. 4, (2004): 744 - 757.
拡張機能
バージョン履歴
R2018a で導入
参考
ブロック
- Induction Machine Current Controller | Induction Machine Direct Torque Control | Induction Machine Direct Torque Control (Single-Phase) | Induction Field-Oriented Control | Induction Machine Field-Oriented Control (Single-Phase) | Induction Machine Induction Flux Observer | Induction Machine Scalar Control