Induction Machine Direct Torque Control
誘導機の DTC
ライブラリ:
Simscape /
Electrical /
Control /
Induction Machine Control
説明
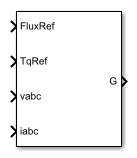
Induction Machine Direct Torque Control ブロックは、誘導機の直接トルク制御 (DTC) 構造を実装します。次の図は、ブロックの等価回路を示しています。

方程式
トルクと磁束を推定するために、Induction Machine Direct Torque Control ブロックは静止 ɑβ 基準座標系で後退オイラー法を使用して、マシンの電圧方程式を離散化します。ɑβ 座標系の固定子磁束の離散時間方程式は、次のとおりです。
および
ここで、
vɑ は ɑ 軸電圧です。
iɑ は ɑ 軸電流です。
Rs は固定子の抵抗です。
Ψɑ は ɑ 軸固定子磁束です。
vβ は β 軸電圧です。
iβ は β 軸電流です。
Ψβ は β 軸固定子磁束です。
ブロックはトルクと磁束を次のように計算します。
および
ここで、
p は極対数です。
Ψs は固定子磁束です。
磁束とトルクの推定誤差を検出するために、ブロックはヒステリシス比較器を使用します。次の図は、ヒステリシス比較器と関連するスイッチング セクターを示しています。

次の表は、インバーターの High 側のシステムにおける最適なスイッチングを示しています。
| cΨ, cTS(θ) | S0 | S1 | S2 | S3 | S4 | S5 | |
|---|---|---|---|---|---|---|---|
| cΨ = 1 | cT = 1 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 |
| cT = 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | |
| cT = -1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | |
| cΨ = 0 | cT = 1 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 |
| cT = 0 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | |
| cT = -1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | |
仮定と制限
電力インバーターのデッド タイムは考慮されません。ハードウェア実装用に、デッド タイムを外部で追加してください。
例
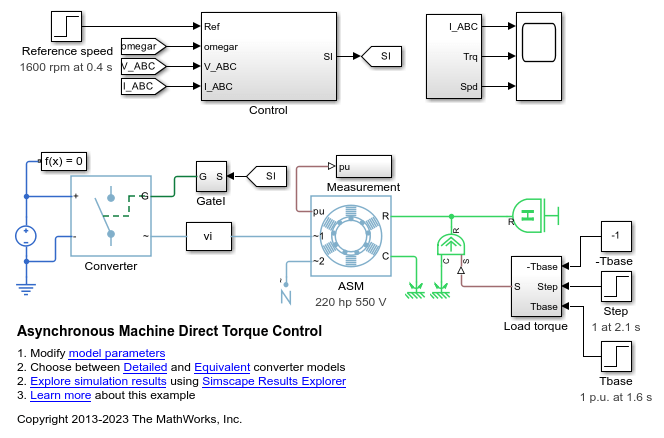
非同期機の直接トルク制御
この例では、直接トルク制御法を使用して非同期機 (ASM) を制御する方法を説明します。PI ベースの速度コントローラーはトルクの指令値を与えます。直接トルク コントローラーはインバーター パルスを生成します。
端子
入力
出力
パラメーター
参照
[1] Takahashi, I., and T. Noguchi. "A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor." IEEE Transactions on Industry Applications. Vol. IA-22, Number 5, 1986, pp. 820 - 827.
拡張機能
バージョン履歴
R2017b で導入
参考
ブロック
- Induction Machine Current Controller | Induction Machine Direct Torque Control (Single-Phase) | Induction Machine Direct Torque Control with Space Vector Modulator | Induction Machine Field-Oriented Control | Induction Machine Field-Oriented Control (Single-Phase) | Induction Machine Flux Observer | Induction Machine Scalar Control