Induction Machine Scalar Control
誘導機の V/f 制御
ライブラリ:
Simscape /
Electrical /
Control /
Induction Machine Control
説明
Induction Machine Scalar Control ブロックは、誘導機のスカラー (つまり V/f または V/Hz) 制御構造を実装します。次のブロック線図は、ブロックが実装する開ループの V/f 制御構造を示しています。
方程式
Induction Machine Scalar Control ブロックは、固定子の電圧の大きさを基準周波数 に基づいて次のように計算します。
ここで、
Vn は定格電圧です。
Vmin は最小電圧です。
fn は定格電気周波数です。
fmin は最小周波数です。
静止基準座標系における電圧成分は次のとおりです。
および
このブロックは、Vα と Vβ から逆 Clarke 変換を使用して Vabc を取得します。
例
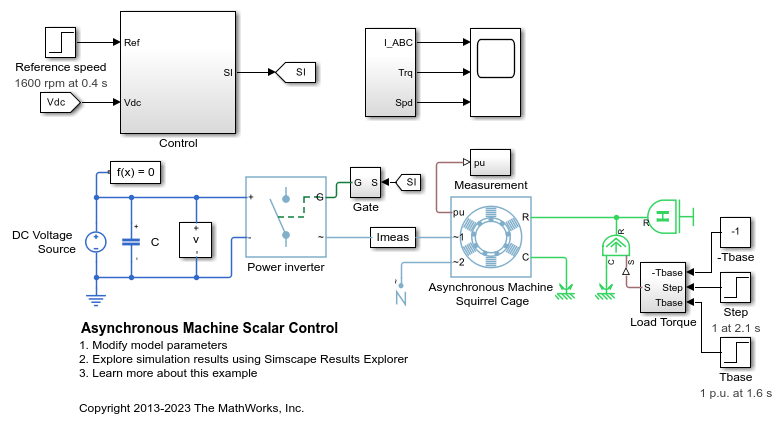
非同期機のスカラー制御
この例では、スカラー V/f 制御法を使用して非同期機 (ASM) 駆動装置の回転子の速度を制御する方法を説明します。コンバーターは、基準速度を基準電気周波数に変換します。コントローラーは、スカラー V/f 制御によって一定の電圧対周波数比を維持し、基準周波数から基準電圧を生成します。
端子
入力
出力
パラメーター
拡張機能
バージョン履歴
R2017b で導入