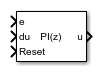
PI Controller (Discrete or Continuous)
外部アンチワインドアップ入力をもつ離散時間または連続時間 PI コントローラー
ライブラリ:
Simscape /
Electrical /
Control /
General Control
説明
Discrete PI Controller ブロックは、外部アンチワインドアップ入力をもつ離散時間または連続時間 PI 制御を実装します。
次のブロック線図は、外部アンチワインドアップ入力をもつコントローラーの等価回路を示しています。

方程式
PI Controller (Discrete or Continuous) ブロックは、後退オイラー離散化法を使用して制御信号を計算します。
ここで、
u は制御信号です。
Kp は比例ゲイン係数です。
Ki は積分ゲイン係数です。
Kaw はアンチワインドアップ ゲイン係数です。
Ts はサンプリング周期です。
e は誤差信号です。
過剰なオーバーシュートを回避するために、このブロックでは逆算を使用してアンチワインドアップ メカニズムを実装できます。飽和した制御信号 usat(k) と計算された飽和していない制御信号 u(k) の差 du(k) を入力します。その後、この差にアンチワインドアップ係数を乗算し、積分ゲインから増幅された信号を加算します。
例
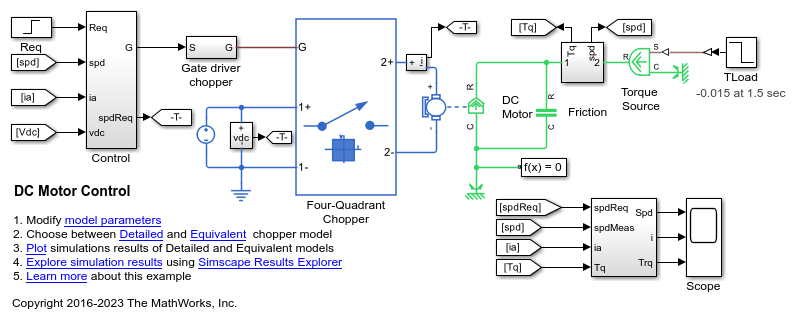
DC モーター制御
この例では、DC モーターのカスケード速度制御構造を説明します。DC モーターに電力を供給するために、PWM 制御の 4 象限チョッパーが使用されます。Control サブシステムには、外側の速度制御ループ、内側の電流制御ループ、および PWM 生成が含まれています。合計シミュレーション時間 (t) は 4 秒です。t = 1.5 秒で負荷トルクが増加します。t = 2.5 秒で基準速度が 1000 rpm から 2000 rpm に変化します。

48 V 始動発電機のエネルギー バランス
この例では、単純化された 48 V の車載システムにおいて始動機/発電機として使用される埋込永久磁石同期機 (IPMSM) を説明します。このシステムには、48 V の電気回路網と 12 V の電気回路網が含まれています。内燃エンジン (ICE) は、基本的な機械ブロックで表されます。IPMSM は、ICE がアイドリング速度に達するまでモーターとして動作し、その後は発電機として動作します。IPMSM は、R3 の電力消費源を含む 48 V 回路網に電力を供給します。48 V 回路網は次の 2 つの消費源を含む 12 V 回路網に電力を供給します。R1 および R2。合計シミュレーション時間 (t) は 0.5 秒です。t = 0.05 秒で ICE が始動します。t = 0.1 秒で R3 がオンになります。t = 0.3 秒で R2 がオンになり、12 V 電気回路網の負荷が増加します。EM Controller サブシステムには、外側の電圧制御ループと内側の 2 つの電流制御ループをもつ、マルチレートの PI ベース カスケード制御構造が含まれています。Control サブシステムのタスク スケジューリングは、Stateflow® のステート マシンとして実装されます。DCDC Controller サブシステムは、12 V 回路網に電力を供給する DC-DC 降圧コンバーター用の単純な PI コントローラーを実装します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

IPMSG の電圧安定化
この例では、埋込永久磁石同期発電機 (IPMSG) をベースとしたハイブリッド電気自動車 (HEV) 用低電圧発電機システムを制御する方法を説明します。Control サブシステムには、外側の電圧制御ループと内側の 2 つの電流制御ループをもつ、マルチレートの PI ベース カスケード制御構造が含まれています。Control サブシステムのタスク スケジューリングは、Stateflow® のステート マシンとして実装されます。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。内燃エンジンを表す理想的な角速度源が IPMSG を駆動します。IPMSG は、負荷 R1 および R2 に低電圧電力を供給します。t = 0.4 秒で、スイッチが閉じ、負荷が増加します。
端子
入力
出力
パラメーター
参照
[1] Åström, K. and T. Hägglund. Advanced PID Control. Research Triangle Park, NC: ISA, 2005.