モデルおよびそのコンポーネントの可視化
マルチボディ モデル全体の可視化
モデルの可視化は、Simscape™ Multibody™ の可視化ユーティリティである Multibody Explorer で開かれます。既定では、Multibody Explorer は、モデルを初めて更新 ([モデル化] タブで [モデルの更新] をクリック) またはシミュレーションを実行したときに、自動的に起動します。この設定を変更するには、Multibody Explorer の有効化を参照してください。
可視化は、モデル内にあるマルチボディ サブアセンブリ、複合ボディ、および単純なボディで構成されます。Multibody Explorer では、固体ジオメトリ、スプライン曲線、慣性アイコン、フレームなどのモデル エンティティが表示されます。Multibody Explorer のツリー ビュー ペインの状況依存メニューを使用すると、個々のエンティティの表示と非表示を選択的に切り替えることができます。モデルの選択的な可視化を参照してください。
可視化は、モデルを更新する場合は静的で、モデルのシミュレーションを行う場合は動的です。ここでの静的可視化ではモデルが初期構成で表示され、ジョイントは初期状態になっています。動的可視化では、記録可能な 3D アニメーションが表示されます。記録には、Video Creator または smwritevideo 関数を使用します。モデルのアニメーション ビデオの作成を参照してください。
可視化ペインの上にあるツール ストリップを使用して視点を操作できます。ツール ストリップでは、モデル ビューの回転、ロール、パン、ズームを行うことができます。Camera Manager を使用すると、シミュレーションの間、モデルと共に移動してモデルを表示し続ける動的カメラを作成できます。可視化カメラを参照してください。
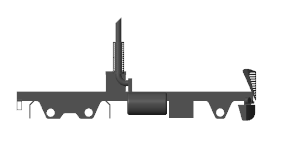
マルチボディ モデルの可視化
MATLAB® コマンド プロンプトで「
openExample('sm/PointOnCurveExample')」と入力します。羽ばたく翼の使用例で示されたモデルが開きます。[モデル化] タブで、[モデルの更新] をクリックします。Multibody Explorer が開き、モデルが初期状態で表示されます。

[実行] をクリックします。Multibody Explorer で、シミュレーション結果に基づいた対話型の 3D アニメーションが再生されます。

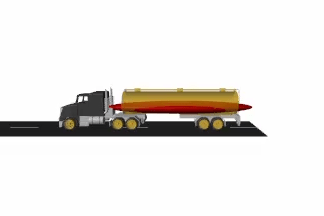
慣性楕円体に関するメモ
等価の慣性楕円体は、(General Variable Mass ブロックを使用してモデル化された) 可変慣性を可視化するための直感的手段を提供します。これらの楕円体は、指定された瞬時の慣性特性からタイム ステップごとに取得した寸法と姿勢を使って、動的にレンダリングされます。楕円体の可視化は、モデルの更新では利用できません。可変慣性特性は物理量信号によって指定されますが、シミュレーションが始まるまでブロックはこの信号の値にアクセスできません。
タンク ローリー モデルの慣性楕円体
個々の固体ジオメトリの可視化
Brick Solid や Spline などのブロックには、ブロックの [Parameters] セクションで指定したジオメトリを表示する可視化ペインがあります。ブロックの可視化を使用すると、不適切な寸法や色などのジオメトリの誤りが発生時に把捉されます。固体ブロックでは、フレームの配置の誤りも把捉されます。
ブロックの可視化は、Multibody Explorer で提供される可視化と似ています。可視化ペインの上にあるツール ストリップを使用して、ビューの回転、ロール、パン、ズームを行うことができます。ツール ストリップには、[Front]、[Top]、[Isometric] などの標準ビュー用のボタンがあります。ブロックのフレームは表示または非表示にできます。
ブロックの可視化は、モデルの更新やシミュレーションを行わなくても最新の表示にすることができます。可視化は、可視化ツール ストリップの [Update Visualization] ボタンをクリックした瞬間に更新されます。ブロック パラメーターに MATLAB 変数を使用していても、可視化の更新機能には影響しません。
固体の可視化
MATLAB コマンド プロンプトで
smnewと入力し、SimscapeMultibody のモデル テンプレートを開きます。テンプレートには、Brick Solid ブロックなどのよく使用されるブロックが含まれています。Brick Solid ブロックのダイアログ ボックスを開きます。可視化ペインは既定で展開されており、既定の固体 (グレーの立方体) の等角投影ビューが表示されます。
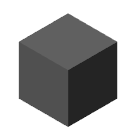
[Graphic] 、 [Color] パラメーターを
[0.5 0 0]に設定します。これは濃い赤色に相当する RGB ベクトルです。固体の可視化ペインの上にある [Update Visualization] ボタンをクリックします。可視化が更新され、赤色になった立法体が表示されます。

インポートされたジオメトリに関するメモ
STEP ファイルまたは STL ファイルから固体ジオメトリをインポートできます。破損したジオメトリ ファイルや無効なジオメトリ ファイルは、可視化やシミュレーションの問題を引き起こします。このようなファイルに関連付けられたジオメトリは、モデルの可視化の際に表示されません。対応する固体の慣性を固体ジオメトリから自動計算できないため、[Inertia] 、 [Type] パラメーターが [Calculate from Geometry] に設定されている場合にはシミュレーションが失敗します。
インポートされた固体ジオメトリ