過渡目標
目的
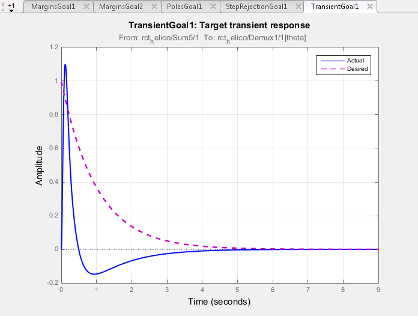
制御システム調整器を使用しているときに、特定の入力信号に対する閉ループ システムの応答を整形します。参照モデルを使用して目標の過渡応答を指定します。
説明
[過渡目標] は、特定の入力位置から特定の出力位置への過渡応答を制約します。この要件は、過渡応答が参照モデルの応答とよく一致するように指定します。この制約は、調整された応答とターゲット応答の相対誤差が指定した許容誤差の範囲内のときに達成されます。
インパルス入力信号、ステップ入力信号またはランプ入力信号の応答を制約できます。また、指定した入力フィルターのインパルス応答によって得られる入力信号の応答を制約することもできます。
作成
制御システム調整器の [調整] タブで [新規目標] 、 [過渡応答の一致] を選択して過渡目標を作成します。
コマンド ラインにおける同等の操作
コマンド ラインで制御システムを調整する場合、TuningGoal.Transient を使用してステップ応答目標を指定します。
応答選択
ダイアログ ボックスのこのセクションを使用して、調整目標を評価するための入力、出力およびループ開始点の位置を指定します。
応答入力の指定
入力を適用するモデル内の信号の位置を 1 つ以上選択します。SISO 応答を制約するには、単一値の入力信号を選択します。たとえば、
'u'という名前の位置から'y'という名前の位置への過渡応答を制約するには、 [信号をリストに追加] をクリックして
[信号をリストに追加] をクリックして 'u'を選択します。MIMO 応答を制約するには、複数の信号またはベクトル値の信号を選択します。応答出力の指定
過渡応答を測定するモデル内の信号の位置を 1 つ以上選択します。SISO 応答を制約するには、単一値の出力信号を選択します。たとえば、
'u'という名前の位置から'y'という名前の位置への過渡応答を制約するには、 [信号をリストに追加] をクリックして 'y'を選択します。MIMO 応答を制約するには、複数の信号またはベクトル値の信号を選択します。MIMO システムの場合、出力の数は入力の数と等しくなければなりません。次の開ループの応答の計算
この調整目標を評価するために、フィードバック ループを開くモデル内の信号の位置を 1 つ以上選択します。調整目標は、特定した位置でフィードバック ループを開くことにより作成される開ループの構成に対して評価されます。たとえば、
'x'という名前の位置が開始点の調整目標を評価するには、 [信号をリストに追加] をクリックして、'x'を選択します。
ヒント
Simulink® モデル内で選択された任意の信号を強調表示するには、![]() をクリックします。入力リストまたは出力リストから信号を削除するには、
をクリックします。入力リストまたは出力リストから信号を削除するには、 をクリックします。複数の信号を選択した場合、
をクリックします。複数の信号を選択した場合、 および
および  を使用してそれらの信号を並べ替えることができます。調整目標のために信号の位置を指定する方法の詳細については、対話型調整の目標の指定を参照してください。
を使用してそれらの信号を並べ替えることができます。調整目標のために信号の位置を指定する方法の詳細については、対話型調整の目標の指定を参照してください。
初期信号選択
制御システム調整器で制約する過渡応答のための入力信号の形状を選択します。
インパルス— 単位インパルスへの応答を制約します。ステップ— 単位ステップへの応答を制約します。[ステップ]を使用することは、ステップ追従目標を使用することと等価です。ランプ— 単位ランプu = tへの応答を制約します。その他— カスタム入力信号への応答を制約します。[フィルターのインパルス応答の使用] フィールドに伝達関数 (tfまたはzpkモデル) を入力することによって、カスタム入力信号を指定します。カスタム入力信号は、単位インパルスに対するこの伝達関数の応答です。この伝達関数は、目標のカスタム入力信号のラプラス変換を表します。たとえば、周波数
wの単位振幅の正弦波への過渡応答を制約するには、tf(w,[1,0,w^2])を入力します。この伝達関数は sin(wt) のラプラス変換です。入力する伝達関数は連続でなければならず、開かれた右半平面に極があってはなりません。目標とする過渡応答の基準システムをもつこの伝達関数の直列接続には、直達項があってはなりません。
目的の過渡応答
目標とする過渡応答の基準システムを、tf モデル、zpk モデル、ss モデルなどの動的システム モデルとして指定します。過渡目標は、[初期信号選択] に指定した入力信号に対するこのシステムの応答とよく一致するようにシステムの応答を制約します。
MATLAB® ワークスペース内の参照モデルの名前を [参照モデル] フィールドに入力します。または、コマンドを入力して tf(1,[1 1.414 1]) などの適切な参照モデルを作成します。参照モデルは安定でなければなりません。また、入力整形フィルターをもつ参照モデルの直列接続には、直達項があってはなりません。
オプション
ダイアログ ボックスのこのセクションを使用して、過渡応答目標の追加特性を指定します。
不一致を次の % 未満に維持
実際の (調整される) 過渡応答とターゲット応答の間の相対一致誤差を指定します。この値を増やすと一致の許容誤差は緩くなります。相対一致誤差 erel は次のように定義されます。
y(t) – yref(t) は応答の不一致で、1 – yref(tr)(t) は yref の過渡部分です (定常値または軌跡からの偏差)。 は信号エネルギー (2 ノルム) を表します。ギャップは、不一致の平方根平均二乗 (RMS) と基準過渡応答の RMS の比として理解することができます。
[入力信号の振幅の調整] と [出力信号の振幅の調整]
MIMO 調整目標において、単位の選択によって応答の異なるチャネルの小さい信号と大きい信号が混合される結果になる場合、このオプションを使用してベクトル値信号のエントリごとの相対振幅を指定できます。この情報は、調整目標の入力から出力への伝達関数の非対角項をスケーリングするために使用されます。このスケーリングは、それぞれの基準信号の振幅に比例して相互干渉が測定されるようにします。
これらのオプションが
[いいえ]に設定されている場合、制約される閉ループ伝達関数は相対的な信号の振幅に対してスケーリングされません。単位の選択によって小さい信号と大きい信号が混合される場合、スケーリングされていない伝達関数を使用すると不十分な調整結果になる場合があります。このオプションを[はい]に設定して、伝達関数の入力信号と出力信号の相対振幅を指定してください。たとえば、調整目標によって 2 つの入力と 2 つの出力をもつ伝達関数を制約すると仮定します。また、伝達関数の 2 番目の入力信号は、1 番目の信号より約 100 倍大きい傾向にあると仮定します。この場合、
[はい]を選択して、[入力信号の振幅] テキスト ボックスに[1,100]を入力します。信号の振幅を調整すると、調整目標はスケーリングされた伝達関数 Do–1T(s)Di 上で評価されます。ここで T(s) はスケーリングされていない伝達関数です。Do および Di は、[出力信号の振幅] と [入力信号の振幅] の値をそれぞれ対角要素にもつ対角行列です。
既定値の [
No] は、スケーリングが適用されないことを表します。目標を適用
たとえば、Simulink モデルを異なる操作点またはブロックパラメーター値で線形化することによって得られるモデルの配列などの複数のモデルを同時に調整している場合、このオプションを使用します。既定では、アクティブな調整目標がすべてのモデルに適用されます。調整要件を配列内の一部のモデルに適用するには、[モデルのみ] を選択します。次に目標を適用するモデルの配列インデックスを入力します。たとえば、モデル配列の中の 2 番目、3 番目、4 番目のモデルに調整目標を適用する必要があると仮定します。要件の適用を制限するには、[モデルのみ] テキスト ボックスに
2:4と入力します。複数モデルの調整の詳細については、Robust Tuning Approaches (Robust Control Toolbox)を参照してください。
ヒント
この要件を使用して制御システムを調整するときに、制御システム調整器は、要件によって制約される伝達に対してゼロの直達 (D = 0) の適用を試みます。ゼロの直達は H2 ノルム、つまり調整目標 (アルゴリズムを参照) の値が非ゼロの直達をもつ連続時間システムで無限であることから適用されます。
制御システム調整器は、直達項に寄与するすべての調整可能なパラメーターをゼロに固定することによってゼロの直達を適用します。これらの調整可能なパラメーターの固定がゼロの直達の適用に不十分な場合、制御システム調整器はエラーを返します。このような場合、要件または制御構造を修正するか、システムの一部の調整可能なパラメーターを直達項を排除する値に手動で固定しなければなりません。
制約された伝達関数が調整可能なブロックを直列でいくつかもつ場合、直達全体に寄与するすべてのパラメーターをゼロに設定するというソフトウェアのアプローチが無難な可能性があります。この場合、いずれか 1 つのブロックの直達項をゼロに設定するだけで十分です。直達をゼロに固定するブロックを制御する場合、選択した調整ブロックの直達を手動で固定できます。
調整可能なブロックのパラメーターを指定した値に固定する方法については、制御システム調整器でのブロック パラメーター化の表示と変更を参照してください。
また、この調整目標は、指定されたループ開始点でループが開いた状態で評価される、指定された入力から出力への閉ループ伝達関数に暗黙的な安定性の制約を課します。この暗黙的な制約に影響を受けるダイナミクスは、この調整目標の "安定ダイナミクス" です。[最小 decay 率] と [最大固有振動数] の調整オプションは、これらの暗黙的に制約されるダイナミクスの下限と上限を制御します。最適化が既定の制限を満たしていない場合、または既定の制限が他の要件と競合している場合、[調整] タブで [調整オプション] を使用して既定の設定を変更します。
アルゴリズム
制御システムを調整するときに、各調整目標は正規化されたスカラー値 f(x) に変換されます。ここで x は、制御システムの自由 (調整可能な) パラメーターのベクトルです。その後、ソフトウェアはパラメーター値を調整して f(x) を最小化するか、調整要件が厳密な制約値の場合、f(x) が 1 より小さくなるようにします。
[過渡目標] の場合、f(x) は調整される応答とターゲット応答の間の相対ギャップをベースにします。
y(t) – yref(t) は応答の不一致で、1 – yref(tr)(t) は yref の過渡部分です (定常値または軌跡からの偏差)。 は信号エネルギー (2 ノルム) を表します。ギャップは、不一致の平方根平均二乗 (RMS) と基準過渡応答の RMS の比として理解することができます。