自動調整の概要
systune や制御システム調整器などの制御システム調整ツールは、設定値追従、外乱の抑制、安定余裕など、指定する高水準の調整目標から制御システムを自動的に調整します。ソフトウェアは、制御システム アーキテクチャや含まれるフィードバック ループの数に関係なく、制御システムの自由パラメーターをすべて一緒に調整します。たとえば、次の図のモデルはヘリコプターのマルチループ制御システムを表します。
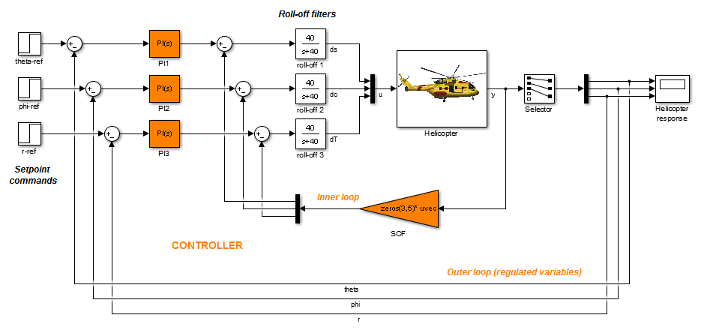
制御システムには、ヘリコプター モデル自体やロールオフ フィルターなどの多数の固定要素が含まれます。内側の制御ループは、デカップリングの静的出力フィードバックを提供します。外側のループには、設定点の追従の PI コントローラーが含まれます。調整ツールでは、設定点の追従、安定余裕などの指定する要件を満たすように SOF ブロックと PI ブロックのゲインを一緒に最適化します。これらのツールを使用すると、任意の制御構造を指定し、システムで調整可能なブロックを指定することができます。
制御システムは、アクチュエータの制限、センサーの精度、計算能力、エネルギー消費などの実行可能性の制約下で特定の性能とロバスト性の目標を達成するように調整されます。"調整目標" のライブラリを使用すると、高速な自動調整に適した形式でこれらの目的を取得できます。このライブラリには、設定値追従、外乱の抑制、ループ形状、閉ループ減衰、安定余裕といった、標準の制御目的が含まれています。これらのツールを使用すると、あらゆる構造の制御システムの多目的調整を実行できます。