直列 RLC 回路のモデル化
物理的なシステムは、陰的な形式の一連の微分方程式  、または陰的な状態空間形式
、または陰的な状態空間形式  として記述することができます。
として記述することができます。
 が特異でない場合、このシステムは簡単に連立常微分方程式 (ODE) に変換して、ODE として解くことができます。
が特異でない場合、このシステムは簡単に連立常微分方程式 (ODE) に変換して、ODE として解くことができます。

多くの場合、システムの状態はその導関数とは直接的な関係がないように見え、通常は物理的な保存則を表します。以下に例を示します。

この場合、 は特異であり、逆行列は計算できません。一般的に、このクラスのシステムは "記述子" システムと呼ばれ、方程式は微分代数方程式 (DAE) と呼ばれます。
直列 RLC 回路
次のような簡単な直列 RLC 回路があるとします。

キルヒホフの電圧則によると、この回路の電圧低下は、各素子の電圧低下の合計と同じです。

キルヒホフの電流則により、次が成り立ちます。

ここで、添字  、
、 、および
、および  はそれぞれ抵抗、インダクタンス、静電容量を表します。
はそれぞれ抵抗、インダクタンス、静電容量を表します。

 または
または 
陰的な状態空間形式の記述
 、
、 、
、 でこのシステムを Simulink® でモデル化し、抵抗
でこのシステムを Simulink® でモデル化し、抵抗  にかかる電圧を求めます。Descriptor State-Space ブロックを使用するために、システムは次に示すような、陰的な (すなわち "記述子の") 状態空間形式
にかかる電圧を求めます。Descriptor State-Space ブロックを使用するために、システムは次に示すような、陰的な (すなわち "記述子の") 状態空間形式  で記述できます。
で記述できます。
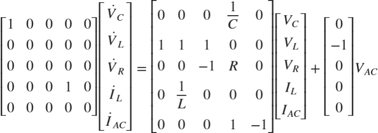
ここで、 は状態ベクトルです。
は状態ベクトルです。
抵抗にかかる電圧を測定しているため、 に設定します。
に設定します。

これを、代数ループによるシステムのモデル化で を求める場合と比較してください。
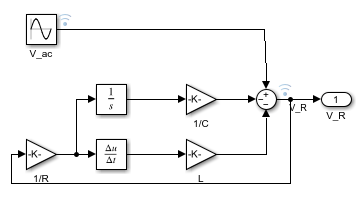
両方のモデルのシミュレーション結果は同じになります。しかし、Descriptor State-Space ブロックでは、ブロック線図がシンプルになり、代数ループを避けることができます。
