cusum
累積和を使用した平均値のわずかな変化の検出
構文
説明
[ は、ターゲット平均値の上下で 5 標準偏差を超えてずれている iupper,ilower] = cusum(x)x の上側累積和と下側累積和の最初のインデックスをそれぞれ返します。最小の検出可能な平均の変化は 1 標準偏差です。関数は、x の最初の 25 個のサンプルからターゲット平均と標準偏差を推定します。
[ は、上側累積和と下側累積和が管理限界を超えるすべてのインデックスを返します。iupper,ilower] = cusum(___,'all')
[ も上側累積和と下側累積和を返します。iupper,ilower,uppersum,lowersum] = cusum(___)
出力引数なしの cusum(___) は、ターゲット平均値の上下 1 標準偏差にそれぞれ正規化された上側累積和と下側累積和をプロットします。
例
線形トレンドをもつ 100 サンプルのランダムな信号を生成してプロットします。再現可能な結果が必要な場合は、乱数発生器をリセットします。
rng('default')
rnds = rand(1,100);
trnd = linspace(0,1,100);
fnc = rnds + trnd;
plot(fnc)
入力引数の既定値を使用して、関数に cusum を適用します。
cusum(fnc)

最初の 25 サンプルの平均値と標準偏差を計算します。これらの数値をターゲット平均値およびターゲット標準偏差として使用し、cusum を適用します。累積和が、ターゲット平均値から 5 標準偏差を超えてずれる点を強調表示します。最小の検出可能な平均の変化を 1 標準偏差に設定します。
mfnc = mean(fnc(1:25)); sfnc = std(fnc(1:25)); cusum(fnc,5,1,mfnc,sfnc)

負の線形トレンドを使用して計算を繰り返します。
nnc = rnds - trnd; cusum(nnc)

損耗により不安定になっている車軸の動作を模した信号を生成します。分散 1/9 のホワイト ガウス ノイズを追加します。再現可能な結果が必要な場合は、乱数発生器をリセットします。
rng default
sz = 200;
dr = airy(2,linspace(-14.9371,1.2,sz));
rd = dr + sin(2*pi*(1:sz)/5) + randn(1,sz)/3;増加するバックグラウンドのずれと結果の信号をプロットします。
plot(dr) hold on plot(rd,'.-') hold off

ずれもノイズもない場合は平均と標準偏差を求めます。ノイズのない理想的な信号とその安定したバックグラウンドをプロットします。
id = 0.3*sin(2*pi*(1:sz)/20); st = id + sin(2*pi*(1:sz)/5); mf = mean(st)
mf = -3.8212e-16
sf = std(st)
sf = 0.7401
plot(id) hold on plot(st,'.-') hold off

CUSUM 管理チャートを使用して、不安定になり始めたポイントを正確に特定します。信号が理想的動作から 3 標準偏差を超えるとシステムが不安定になる、と仮定します。最小の検出可能な変化を 1 標準偏差で指定します。
cusum(rd,3,1,mf,sf)

最小検出可能変化量を増やして違反基準をより厳格にします。望ましくないずれのインスタンスをすべて返します。
cusum(rd,3,1.2,mf,sf,'all')
ゴルフでは、ボールがホールインするまでに必要な予想ストローク数を示す "パー" がホールごとに関連付けられています。技術の高いプレーヤーは、通常、パーに非常に近いストローク数で各ホールを終了します。勝者が明らかになるまでには、数ホールをプレーし、スコアを累積する必要があります。
ベン、ジェンおよびケンは、18 ホールで構成されるフル ラウンドをプレーします。コースは、パー 3、パー 4 およびパー 5 のホールの組み合わせから成っています。ゲームの終了時に、プレーヤーは各自のスコアを集計します。
hole = 1:18;
par = [4 3 5 3 4 5 3 4 4 4 5 3 5 4 4 4 3 4];
nms = {'Ben';'Jen';'Ken'};
Ben = [4 3 4 2 3 5 2 3 3 4 3 2 3 3 3 3 2 3];
Jen = [4 3 4 3 4 4 3 4 4 4 5 3 4 4 5 5 3 3];
Ken = [4 3 4 3 5 5 4 4 4 4 5 3 5 4 5 4 3 5];
T = table(hole',par',Ben',Jen',Ken', ...
'VariableNames',['hole';'par';nms])T=18×5 table
hole par Ben Jen Ken
____ ___ ___ ___ ___
1 4 4 4 4
2 3 3 3 3
3 5 4 4 4
4 3 2 3 3
5 4 3 4 5
6 5 5 4 5
7 3 2 3 4
8 4 3 4 4
9 4 3 4 4
10 4 4 4 4
11 5 3 5 5
12 3 2 3 3
13 5 3 4 5
14 4 3 4 4
15 4 3 5 5
16 4 3 5 4
⋮
ラウンドの勝者は、終了時に下側累積和がパーを最も下回っているプレーヤーです。3 人のプレーヤーについて合計を計算し、優勝者を決定します。しきい値を低く設定し、平均の変化がすべて検出できるようにします。
[~,b,~,Bensum] = cusum(Ben-par,1,1e-4,0); [~,j,~,Jensum] = cusum(Jen-par,1,1e-4,0); [~,k,~,Kensum] = cusum(Ken-par,1,1e-4,0); plot([Bensum;Jensum;Kensum]') legend(nms,'Location','best')
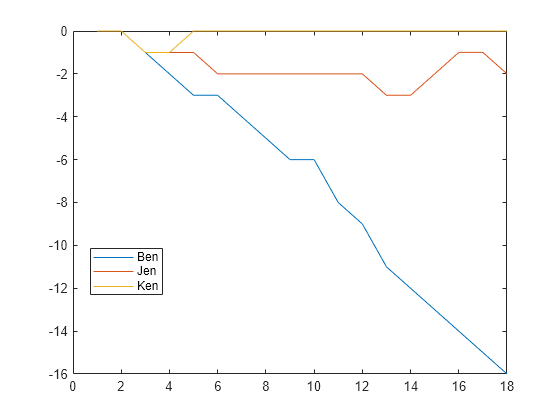
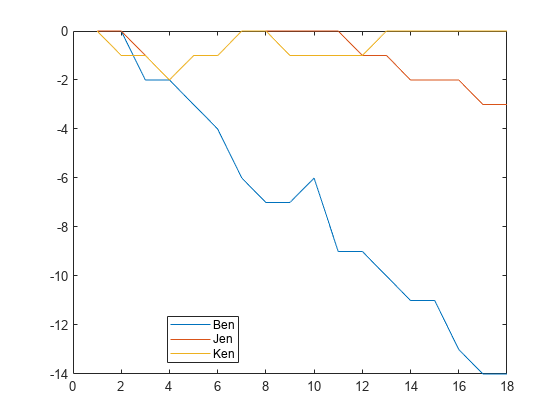
ベンがラウンドを優勝しました。ホールごとのストローク数を無作為に増減して、次のゲームをシミュレートします。
Ben = Ben+randi(3,1,18)-2; Jen = Jen+randi(3,1,18)-2; Ken = Ken+randi(3,1,18)-2; [~,b,~,Bensum] = cusum(Ben-par,1,1e-4,0); [~,j,~,Jensum] = cusum(Jen-par,1,1e-4,0); [~,k,~,Kensum] = cusum(Ken-par,1,1e-4,0); plot([Bensum;Jensum;Kensum]') legend(nms,'Location','best')
入力引数
出力引数
詳細
拡張機能
バージョン履歴
R2016a で導入