このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
dopplerShiftCircularOrbit
構文
説明
shift = dopplerShiftCircularOrbit(el,hs,hg,freq)el、衛星高度hs、地上局高度hg、および衛星搬送周波数 freq で、円軌道を周回する衛星による地上局でのドップラーシフトをヘルツ単位で計算します。
詳細については、ドップラーシフトの計算を参照してください。
メモ
dopplerShiftCircularOrbit は以下を前提としています:
地球は球体であり、地上局は静止しており、地球は自転しません。
衛星から地上局へのアクセスまたはリンクは常時可能です。
地上局は北極(正の Z 軸)に位置し、衛星はYZ 平面の第 2 象限にある初期入力仰角
elからスタートします。衛星は円軌道上を時計回りに移動します。
例
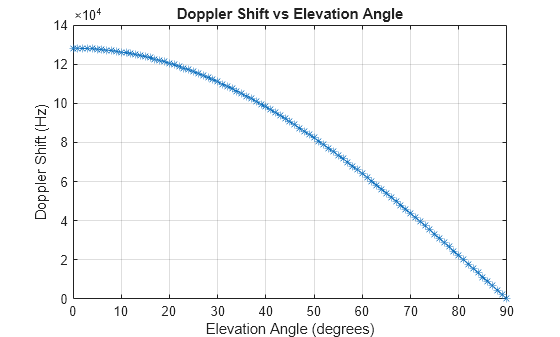
円軌道を移動する衛星のドップラーシフトを計算し、ドップラーシフトを仰角の関数としてプロットします。
衛星高度を 10000 km、地上局高度を 120 m、衛星搬送周波数を 20 GHz に設定します。
hs = 10000e3; % meters hg = 120; % meters freq = 20e9; % Hz
仰角を0 度から 90 度まで変化させます。
el = 0:90; % degreesさまざまな仰角に対するドップラーシフトを計算します。
shift = dopplerShiftCircularOrbit(el,hs,hg,freq);
ドップラーシフトを仰角の関数としてプロットします。
figure plot(el,shift,"-*") title("Doppler Shift vs Elevation Angle") xlabel("Elevation Angle (degrees)") ylabel("Doppler Shift (Hz)") grid on
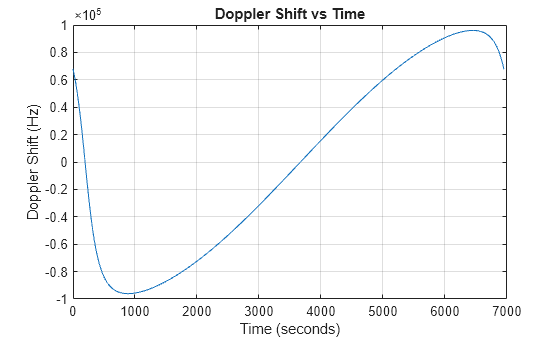
衛星の1軌道周期におけるドップラーシフトの変化を可視化します。
衛星高度を 1500 km、初期仰角を 45 度、衛星搬送周波数を 5 GHz に設定します。地上局の高さは0mと仮定します。
hs = 1500e3; % meters el = 45; % degrees freq = 5e9; % Hz hg = 0; % meters
指定された衛星高度1500 km の場合、軌道周期は 6949.518 秒です。1 周回期間をカバーするには、最大時間インスタンスを 6950 秒に設定します。
time = 0:6950; % seconds指定された時間インスタンスのドップラーシフトを計算します。
shift = dopplerShiftCircularOrbit(el,hs,hg,freq,time);
ドップラーシフトを時間の関数としてプロットします。
figure plot(time,shift) title("Doppler Shift vs Time") xlabel("Time (seconds)") ylabel("Doppler Shift (Hz)") grid on
入力引数
衛星の仰角(度単位)。実数のスカラーまたはベクトルとして指定されます。
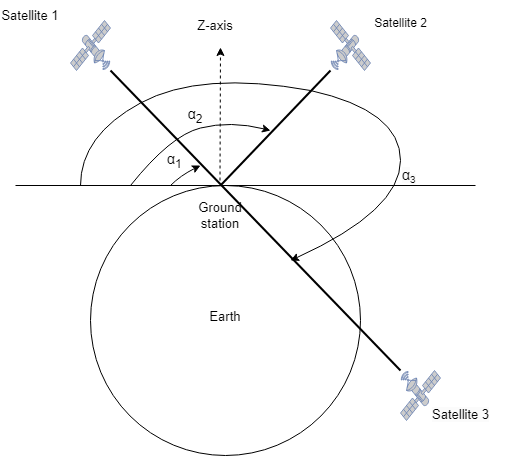
この関数は、各仰角を独立した衛星として扱います。仰角の公称範囲は 0 度から 90 度です。ただし、この関数は任意の仰角を受け入れるため、衛星を軌道上の任意の場所に配置できます。
たとえば、この図は、el 入力が [45 135 225] となるシナリオを示しています。この場合、関数は 3 つの独立した衛星があると想定します。
衛星1、仰角α1 = 45°
衛星2、仰角α2 = 135°
衛星3、仰角α3 = 225°
データ型: double
衛星の高度(メートル単位)。正のスカラーとして指定されます。
データ型: double
地上局の高度(メートル単位)。非負のスカラーとして指定されます。
hg は hs より小さくなければなりません。
データ型: double
衛星搬送周波数(ヘルツ単位)。非負のスカラーとして指定されます。
データ型: double
出力引数
詳細
この図は、地球上の地上局に対して仰角α で時計回り方向に円軌道を周回する衛星を示しています。地上局は北極(Z軸の正方向)にあります。地球の中心で測定された衛星の回転角度は θ です。
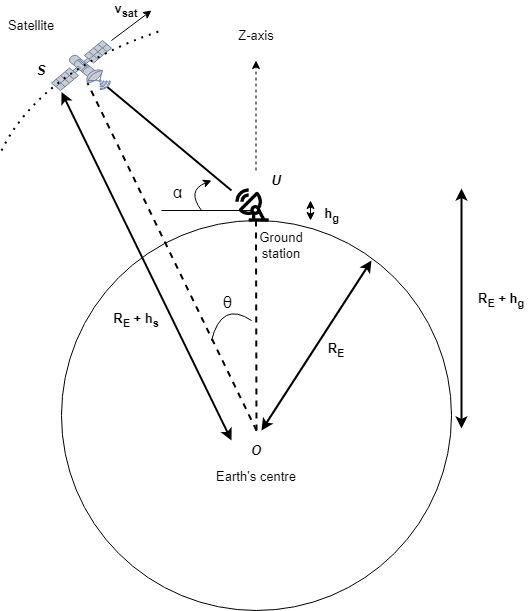
図の衛星がYZ平面内を移動していることを考えると、衛星の位置ベクトル[X; Y; Z]は
で与えられます。ここで、
R = RE + hg、ここで:
RE =
6371e3メートルhgは地上局の高度です
H = hs - hg、hsは衛星の高度です
-
ここで:
G は
6.6743e-11の重力定数です (m3kg-1s-2 におけるニュートンの重力定数)Mは地球の質量です:
5.9722e24kg
衛星の位置ベクトルを使用すると、速度ベクトルは次のように表されます:
この関数は地上局が静止していると想定しているため、位置と速度のベクトルは次のようになります。
地上局の位置 = Xg(t) = [0; 0; R]
地上局の速度 = Vg(t) = [0; 0; 0]
円軌道を回る衛星による地上局でのドップラーシフトの式を導くには、dopplershift ページの ドップラーシフト セクションの手順に従って、次の置き換えを行ってください。
音源の位置 — Xsat(t)
音源の速度 — Vsat(t)
ターゲットの位置 — Xg(t)
ターゲットの速度 — Vg(t)
拡張機能
バージョン履歴
R2024a で導入