Read and Apply Transformation to ROS Message in Simulink
This example shows how to read transformations from ROS network and use them to transform a pose message using Simulink®.
Publish Transformation and Pose Messages on ROS Network
Initialize the ROS network.
rosinit
Launching ROS Core... Status before launching ros core :0 result before launching ros core: 887 ? Ssl 3:44 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 202825 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 202827 pts/1 S+ 0:00 grep -E ros|python Done in 0.52077 seconds. * Inside getProcessPID function * Process Name: /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 Status before getting PID :0 Result before getting PID : 887 ? Ssl 3:45 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 202830 pts/1 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_750768/tp8990ffa9_7768_45d1_b2bd_66cfa31e4c43/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 202842 pts/1 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 58564 -w 3 202850 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 202852 pts/1 S+ 0:00 grep -E ros|python Result: 202830 pts/1 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_750768/tp8990ffa9_7768_45d1_b2bd_66cfa31e4c43/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 Status: 0 PID obtained: 202830 Status after getting PID :0 Result after getting PID : 887 ? Ssl 3:45 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 202830 pts/1 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_750768/tp8990ffa9_7768_45d1_b2bd_66cfa31e4c43/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 202842 pts/1 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 58564 -w 3 202857 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 202859 pts/1 S+ 0:00 grep -E ros|python * Exiting getProcessPID function * Status after launching ros core :0 result after launching ros core: 887 ? Ssl 3:45 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 202830 pts/1 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_750768/tp8990ffa9_7768_45d1_b2bd_66cfa31e4c43/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 202842 pts/1 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 58564 -w 3 202860 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 202862 pts/1 S+ 0:00 grep -E ros|python Status before deleting node :0 Result before deleting node : 887 ? Ssl 3:45 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 202830 pts/1 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_750768/tp8990ffa9_7768_45d1_b2bd_66cfa31e4c43/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 202842 pts/1 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 58564 -w 3 202863 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 602 -1 -mvmOutputPipe -1 752 202878 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 202880 pts/1 S+ 0:00 grep -E ros|python Status after deleting node :0 Result after deleting node : 887 ? Ssl 3:45 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 202830 pts/1 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_750768/tp8990ffa9_7768_45d1_b2bd_66cfa31e4c43/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 202842 pts/1 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 58564 -w 3 202884 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 202886 pts/1 S+ 0:00 grep -E ros|python Initializing ROS master on http://172.20.225.90:58564. Initializing global node /matlab_global_node_34348 with NodeURI http://dcc940776glnxa64:45949/ and MasterURI http://localhost:58564.
Use the exampleHelperROSStartTfPublisher function to start publishing transformation data. The function publishes transformations between these frames:
robot_basecamera_centermounting_point
exampleHelperROSStartTfPublisher
Create a ROS publisher to publish pose messages.
[posePub,poseMsg] = rospublisher("/pose","geometry_msgs/PoseStamped",DataFormat="struct");
Create and publish the pose message.
poseMsg.Pose.Position.X = 1; poseMsg.Pose.Position.Y = 1; poseMsg.Pose.Position.Z = 0.5; send(posePub,poseMsg)
Read and Apply Transformation
Open the readAndApplyROSTransform model. The Get Transform block reads the transformation between the target robot_base and the source camera_center frames as a geometry_msgs/TransformStamped bus. The Header Assignment block assigns the frame ID camera_center to the pose message. Then, the Apply Transform block transforms the pose message using the read transformation value. The model then writes the transformed pose message into MATLAB® workspace.
modelName = "readAndApplyROSTransform";
open_system(modelName)![]()
The readAndApplyROSTransform model uses Simulation Pacing to run at a pace where the simulation time is same as the wall clock time. This is important to ensure that Simulink synchronizes correctly with the transforms being published to the transformation tree in the ROS network.
Simulate the model.
out = sim(modelName);
Status before deleting node :0 Result before deleting node : 887 ? Ssl 3:45 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 202830 pts/1 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_750768/tp8990ffa9_7768_45d1_b2bd_66cfa31e4c43/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 202842 pts/1 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 58564 -w 3 202887 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 602 -1 -mvmOutputPipe -1 752 202991 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 609 -1 -mvmOutputPipe -1 841 203047 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 203049 pts/1 S+ 0:00 grep -E ros|python Status after deleting node :0 Result after deleting node : 887 ? Ssl 3:45 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 202830 pts/1 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_750768/tp8990ffa9_7768_45d1_b2bd_66cfa31e4c43/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 202842 pts/1 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 58564 -w 3 202887 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 602 -1 -mvmOutputPipe -1 752 202991 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 609 -1 -mvmOutputPipe -1 841 203050 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 203052 pts/1 S+ 0:00 grep -E ros|python
Visualize Input and Transformed Poses
Get transformed pose as geometry_msgs/Pose message from the simulation output variable in the workspace.
transformedPoseMsg = helperGetTransformedROSPoseFromSimout(out);
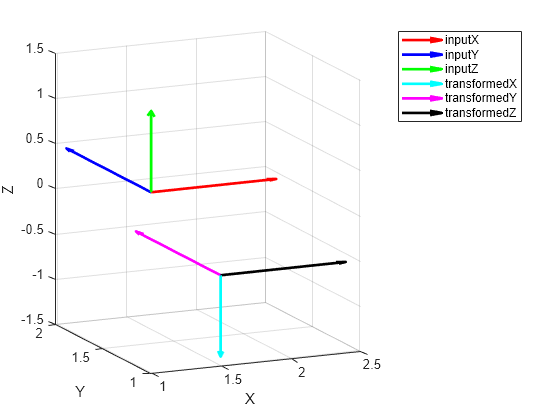
You can visualize poses as local coordinate frames in the global cartesian coordinates. You can calculate the location and basis axes orientation of the local frames by using the position and orientation information in the poses, respectively. For both input and transformed poses, use the helperGetTransformedAxesVectorsFromROSQuat function to get the basis vectors of the local coordinate frame.
[inputPoseX,inputPoseY,inputPoseZ] = helperGetTransformedAxesVectorsFromROSQuat(poseMsg.Pose.Orientation); [transformedPoseX,transformedPoseY,transformedPoseZ] = helperGetTransformedAxesVectorsFromROSQuat(transformedPoseMsg.Pose.Orientation);
Visualize the poses as local coordinate frames based on the position and orientation values. The quiver3 function visualizes the basis vectors at the specified pose location.
quiver3(poseMsg.Pose.Position.X,poseMsg.Pose.Position.Y,poseMsg.Pose.Position.Z,inputPoseX(1),inputPoseX(2),inputPoseX(3),'r',LineWidth=2) hold on quiver3(poseMsg.Pose.Position.X,poseMsg.Pose.Position.Y,poseMsg.Pose.Position.Z,inputPoseY(1),inputPoseY(2),inputPoseY(3),'b',LineWidth=2) quiver3(poseMsg.Pose.Position.X,poseMsg.Pose.Position.Y,poseMsg.Pose.Position.Z,inputPoseZ(1),inputPoseZ(2),inputPoseZ(3),'g',LineWidth=2) quiver3(transformedPoseMsg.Pose.Position.X,transformedPoseMsg.Pose.Position.Y,transformedPoseMsg.Pose.Position.Z,transformedPoseX(1),transformedPoseX(2),transformedPoseX(3),'c',LineWidth=2) quiver3(transformedPoseMsg.Pose.Position.X,transformedPoseMsg.Pose.Position.Y,transformedPoseMsg.Pose.Position.Z,transformedPoseY(1),transformedPoseY(2),transformedPoseY(3),'m',LineWidth=2) quiver3(transformedPoseMsg.Pose.Position.X,transformedPoseMsg.Pose.Position.Y,transformedPoseMsg.Pose.Position.Z,transformedPoseZ(1),transformedPoseZ(2),transformedPoseZ(3),'k',LineWidth=2) legend("inputX","inputY","inputZ","transformedX","transformedY","transformedZ") xlabel('X') ylabel('Y') zlabel('Z') view([-24.39 11.31])
Shut down the ROS network.
rosshutdown
Shutting down global node /matlab_global_node_34348 with NodeURI http://dcc940776glnxa64:45949/ and MasterURI http://localhost:58564. Status before deleting node :0 Result before deleting node : 887 ? Ssl 3:45 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 202830 pts/1 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_750768/tp8990ffa9_7768_45d1_b2bd_66cfa31e4c43/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 202842 pts/1 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 58564 -w 3 202887 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 602 -1 -mvmOutputPipe -1 752 203059 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 203061 pts/1 S+ 0:00 grep -E ros|python Status after deleting node :0 Result after deleting node : 887 ? Ssl 3:45 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 202830 pts/1 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_750768/tp8990ffa9_7768_45d1_b2bd_66cfa31e4c43/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 202842 pts/1 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 58564 -w 3 203065 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 203067 pts/1 S+ 0:00 grep -E ros|python Shutting down ROS master on http://172.20.225.90:58564. Status before deleting core :0 Result before deleting core : 887 ? Ssl 3:45 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 202830 pts/1 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_750768/tp8990ffa9_7768_45d1_b2bd_66cfa31e4c43/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 58564 -w 3 202842 pts/1 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 58564 -w 3 203068 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 203070 pts/1 S+ 0:00 grep -E ros|python * Inside killProcessByPID function * PID of core to be killed: 202830 Status after Child Process Killed: 0 Result after Child Process Killed: Status after deleting core :0 Result after deleting core : 887 ? Ssl 3:45 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1168 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 201343 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201373 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_750768 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201378 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.94e28ee213d9fee82e23c96e6e6778f8 MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 201432 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook6.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 203075 pts/1 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 203077 pts/1 S+ 0:00 grep -E ros|python * Exiting killProcessByPID function *