ROS ネットワーク アドレスの構成
Simulink® はモデルの初期化中に ROS マスターに接続し、モデルに関連付けるノードを作成します。ROS マスターの URI とノード ホストは [ROS ネットワーク アドレスの構成] ダイアログで指定します。これは、[ROS Toolbox]、[ROS ネットワーク] を選択することにより、[シミュレーション] タブからアクセスできます。
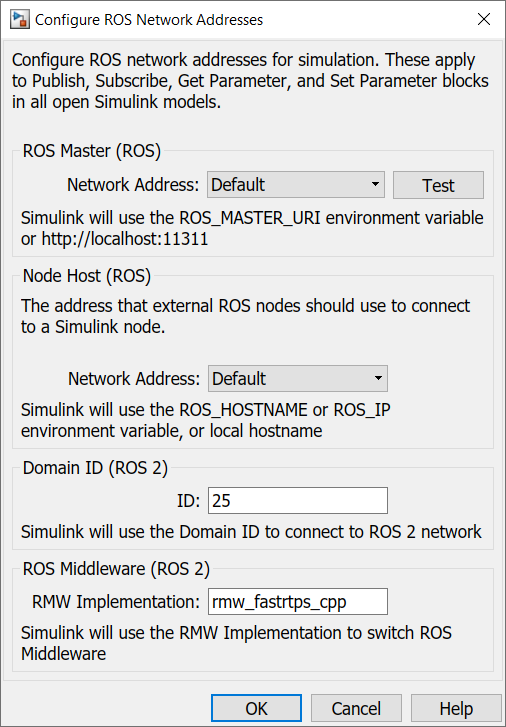
[ネットワーク アドレス] パラメーターは [既定値] または [カスタム] に設定できます。
ROS マスターの URI については、[ネットワーク アドレス] が [既定値] に設定されている場合、Simulink は以下のルールに従って ROS マスターの URI を設定します。
環境変数
ROS_MASTER_URIが設定されている場合は、これを使用します。MATLAB® グローバル ROS ノードが存在する場合は、グローバル ノードと関連付けられているマスター URI を使用します。グローバル ノードは
rosinitを呼び出した時に自動的に作成されます。上記の 2 つのルールが当てはまらない場合は、アドレス
http://localhost:11311を使用します。
ノード ホストについては、[ネットワーク アドレス] が [既定値] に設定されている場合、Simulink は以下のルールに従って ROS ノード ホストを設定します。
環境変数
ROS_HOSTNAMEが設定されている場合は、これを使用します。環境変数
ROS_IPが設定されている場合は、これを使用します。システムの最初のネットワーク インターフェイスのホスト名または IP アドレスが利用可能な場合は、これを使用します。
上記のルールが当てはまらない場合は、アドレス
http://localhost:11311を使用します。
どちらについても、これらのルールは MATLAB が ROS ネットワーク アドレスの解決に使用するものと同じです。
一方で [カスタム] を選択した場合は、すべての変数を以下に示すように設定できます。これは環境変数をオーバーライドします。
メモ: これらのアドレスは、モデルではなく MATLAB 基本設定に保存されます。そのため、この情報はすべての Simulink モデルと、同じリリースの複数の MATLAB インストールで共有されます。

また、[テスト] ボタンを使用して、ROS マスターに接続できることを確認できます。エラーが発生した場合は、rosinit を呼び出してローカル ROS ネットワークを設定するか、リモート ROS マスターが指定されている場合は設定が正しいことを確認します。
スタンドアロン ノードの展開では、カスタム ROS マスターやノード ホストの設定は生成されたコードで使用されません。