Train Multiple Agents for Area Coverage
This example demonstrates a multiagent collaborative task in which you train three proximal policy optimization (PPO) agents to achieve full coverage of a grid-world environment. As shown in this example, if you define your environment behavior using MATLAB® code, you can also incorporate it into a Simulink® environment using MATLAB Function blocks.
Fix Random Number Stream for Reproducibility
The example code might involve computation of random numbers at several stages. Fixing the random number stream at the beginning of some sections in the example code preserves the random number sequence in the section every time you run it, which increases the likelihood of reproducing the results. For more information, see Results Reproducibility.
Fix the random number stream with seed 0 and random number algorithm Mersenne twister. For more information on controlling the seed used for random number generation, see rng.
previousRngState = rng(0,"twister");The output previousRngState is a structure that contains information about the previous state of the stream. You will restore the state at the end of the example.
Environment Description
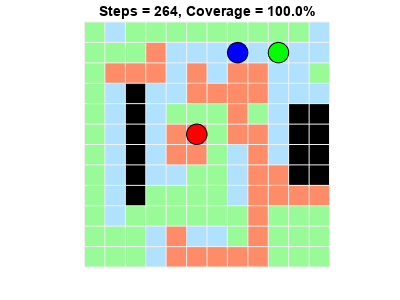
The environment in this example is a 12x12 grid world containing obstacles, with unexplored cells marked in white and obstacles marked in black. The environment contains three robots, represented by the red, green, and blue circles. Three proximal policy optimization agents with discrete action spaces control the robots. To learn more about PPO agents, see Proximal Policy Optimization (PPO) Agent.

The agents provide one of five possible movement actions (WAIT, UP, DOWN, LEFT, or RIGHT) to their respective robots. The robots decide whether an action is legal or illegal. For example, an action of moving LEFT when the robot is located next to the left boundary of the environment is deemed illegal. Similarly, actions for colliding against obstacles and other agents in the environment are illegal actions and draw penalties. The overall goal is to explore all cells within a fixed time frame.
At each time step, an agent observes the environment using a 12x12x4 image. Each of the four channels in the image captures the following information in order:
Cells with obstacles.
Current position of the robot (self) being controlled.
Position of other (friend) robots.
Cells that have been explored during the episode.
The following figure shows an example of what the agent controlling the green robot observes for a given time step.

For the grid world environment:
The search area is a
12x12grid with obstacles.The observation for each agent is a
12x12x4image.The discrete action set contains five actions
(WAIT=0, UP=1, DOWN=2, LEFT=3, RIGHT=4).The simulation terminates when the grid is fully explored or the maximum number of steps is reached.
At each time step, agents receive the following rewards:
+2for moving to a previously unexplored cell (white).-1for an illegal action (attempt to move outside the boundary or collide against other robots and obstacles).-1for an action that results in no motion (lazy penalty).-0.5for moving to an explored cell.+100if the grid is fully explored.
Create Environment Object
Define the locations of obstacles within the grid using a matrix of indices. The first column contains the row indices, and the second column contains the column indices.
obsMat = [ ... 4 3; ... 5 3; ... 6 3; ... 7 3; ... 8 3; ... 9 3; ... 5 11; ... 6 11; ... 7 11; ... 8 11; ... 5 12; ... 6 12; ... 7 12; ... 8 12 ];
Initialize the robot positions.
sA0 = [2 2]; sB0 = [11 4]; sC0 = [3 12]; s0 = [sA0; sB0; sC0];
Configure the initial condition of the grid.
% initial grid g0 = zeros(12,12); % obstacle cells have the value 1.0 for idx = 1:size(obsMat,1) r = obsMat(idx,1); c = obsMat(idx,2); g0(r,c) = 1.0; end % robot cells have the values: % 0.25 (red), % 0.50 (green), % and 0.75 (blue) g0(sA0(1),sA0(2)) = 0.25; g0(sB0(1),sB0(2)) = 0.50; g0(sC0(1),sC0(2)) = 0.75;
Specify the sample time, simulation time, and maximum number of steps per episode.
Ts = 0.1; Tf = 100; maxsteps = ceil(Tf/Ts);
Open the model. There are three RL Agent blocks and a subsystem block that models the area coverage environment.
mdl = "rlAreaCoverage";
open_system(mdl)
The environment dynamics is implemented using MATLAB Function blocks. Navigate to the Environment subsystem to view the implementation.
For a related example on how to call environment functions from Simulink, see Create and Simulate Same Environment in Both MATLAB and Simulink.
open_system(mdl+"/Environment")
Note that the states of the environment (grid, numSteps, numExplored and nextX signals) are updated iteratively in the feedback loop. Initial values for those signals are specified in the unit delay blocks to ensure the environment is correctly initialized.
In this example, the agents are homogeneous and have the same observation and action specifications. Create the observation and action specifications for the environment. For more information, see rlNumericSpec and rlFiniteSetSpec.
% Define observation specifications. obsSize = [12 12 4]; oinfo = rlNumericSpec(obsSize); oinfo.Name = "observations"; % Define action specifications. numAct = 5; actionSpace = {0,1,2,3,4}; ainfo = rlFiniteSetSpec(actionSpace); ainfo.Name = "actions";
Specify the block paths for the agents.
blks = mdl + ... ["/Agent A (Red)","/Agent B (Green)","/Agent C (Blue)"];
Create the environment object, specifying the same observation and action specifications for all three agents.
obsInfos = {oinfo,oinfo,oinfo};
actInfos = {ainfo,ainfo,ainfo};
env = rlSimulinkEnv(mdl,blks,obsInfos,actInfos);Specify a reset function for the environment. The function resetMap (provided at the end of this example) ensures that the robots start from random initial positions at the beginning of each episode. The random initialization makes the agents robust to different starting positions and can improve training performance.
env.ResetFcn = @(in) resetMap(in, obsMat);
Create PPO Agents with Custom Networks
The PPO agents in this example operate on a discrete action space and rely on actor and critic functions to learn the optimal policies. The agents maintain deep neural network-based function approximators for the actors and critics with similar network structures (a combination of convolution and fully connected layers). The critic outputs a scalar value representing the state value . The actor outputs the probabilities of taking each of the five actions WAIT, UP, DOWN, LEFT, or RIGHT.
Create the actor and critic functions using the following steps.
Create the actor and critic deep neural networks.
Create the actor function objects using the
rlDiscreteCategoricalActorcommand.Create the critic function objects using the
rlValueFunctioncommand.
When you create the agent networks, the initial parameters are initialized with random values. Fix the random number stream so that the agent is always initialized with the same parameter values.
rng(0,"twister");Use the same network structure for all three agents.
actorNetwork = [
imageInputLayer(obsSize)
convolution2dLayer(3,16,Padding="same", ...
PaddingValue=-1,Stride=2)
reluLayer
maxPooling2dLayer(3,Padding="same",Stride=2)
fullyConnectedLayer(256)
reluLayer
fullyConnectedLayer(256)
reluLayer
fullyConnectedLayer(numAct)
softmaxLayer
];
actorNetwork = dlnetwork(actorNetwork);
criticNetwork = [
imageInputLayer(obsSize)
convolution2dLayer(3,16,Padding="same", ...
PaddingValue=-1,Stride=2)
reluLayer
maxPooling2dLayer(3,Padding="same",Stride=2)
fullyConnectedLayer(256)
reluLayer
fullyConnectedLayer(256)
reluLayer
fullyConnectedLayer(1)
];
criticNetwork = dlnetwork(criticNetwork);View the summary of the actor and critic networks.
summary(actorNetwork)
Initialized: true
Number of learnables: 104.8k
Inputs:
1 'imageinput' 12×12×4 images
summary(criticNetwork)
Initialized: true
Number of learnables: 103.8k
Inputs:
1 'imageinput' 12×12×4 images
Plot the actor and critic networks.
plot(actorNetwork)

plot(criticNetwork)
Create the actor and critic objects.
for idx = 1:3 actor(idx) = rlDiscreteCategoricalActor(actorNetwork,oinfo,ainfo); critic(idx) = rlValueFunction(criticNetwork,oinfo); end
Specify training options for the critic and the actor using rlOptimizerOptions.
The agents learn using the learning rate
1e-3for the actors and critics. A large learning rate causes drastic updates which might lead to divergent behaviors, while a low value might require many updates before reaching the optimal point.Use a gradient threshold of
1.0to clip the gradients. Clipping the gradients can improve training stability.Use the L2 regularization factor
1e-4to stabilize the training.
actorOpts = rlOptimizerOptions( ... LearnRate=1e-3, ... GradientThreshold=1, ... L2RegularizationFactor=1e-4); criticOpts = rlOptimizerOptions( ... LearnRate=1e-3, ... GradientThreshold=1, ... L2RegularizationFactor=1e-4);
Specify the agent options using rlPPOAgentOptions, include the training options for the actor and critic. Use the same options for all three agents.
For this training:
Use the experience horizon value of
500. A large experience horizon can improve the stability of the training.Train with mini-batches of length
200. Smaller mini-batches are computationally efficient but might introduce variance in training. Contrarily, larger batch sizes can make the training stable but require higher memory.Use the discount factor
0.9to favor long term rewards.Specify the sample time
Ts=0.1second for the agents.
agentOpts = rlPPOAgentOptions( ... ActorOptimizerOptions=actorOpts, ... CriticOptimizerOptions=criticOpts, ... ExperienceHorizon=500, ... MiniBatchSize=200, ... SampleTime=Ts, ... DiscountFactor=0.9);
Create the agents using the defined actors, critics, and agent options.
agentA = rlPPOAgent(actor(1),critic(1),agentOpts); agentB = rlPPOAgent(actor(2),critic(2),agentOpts); agentC = rlPPOAgent(actor(3),critic(3),agentOpts);
Alternatively, you can create the agents first, and then access their option object to modify the options using dot notation.
Train Agents
In this example, the agents are trained in centralized manner. Specify the following options for training:
Specify all agents under one agent group.
Specify the
"centralized"learning strategy.Run the training for a maximum of
500episodes, with each episode lasting a maximum ofmaxsteps(1000) time steps.Stop the training an agent when its average reward over
20consecutive episodes is200or more.Do not store simulation data in memory to improve performance. Alternatively, you can specify
SimulationStorageTypeas"file"to store simulation data to disk.
trainOpts = rlMultiAgentTrainingOptions( ... AgentGroups={[1,2,3]}, ... LearningStrategy="centralized", ... MaxEpisodes=500, ... MaxStepsPerEpisode=maxsteps, ... SimulationStorageType="none", ... ScoreAveragingWindowLength=20, ... StopTrainingCriteria="AverageReward", ... StopTrainingValue=200);
For more information, see rlMultiAgentTrainingOptions.
Fix the random stream for reproducibility.
rng(0,"twister");To train the agents, specify an array of agents to the train function. The order of the agents in the array must match the order of agent block paths specified during environment creation. Doing so ensures that the agent objects are linked to the appropriate action and observation specifications in the environment.
Training is a computationally intensive process that takes several minutes to complete. To save time while running this example, load pretrained agent parameters by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining =false; if doTraining result = train([agentA,agentB,agentC],env,trainOpts); else load("rlAreaCoverageAgents.mat","params"); % The saved agents were trained in centralized manner % with synchronized model parameters. % Set the trained parameters on all agents. setLearnableParameters(agentA, params); setLearnableParameters(agentB, params); setLearnableParameters(agentC, params); end
The following figure shows a snapshot of the training progress. You can expect different results due to randomness in the training process.

Simulate Agents
Fix the random stream for reproducibility.
rng(0,"twister");Simulate the trained agents within the environment. For more information on agent simulation, see rlSimulationOptions and sim.
simOpts = rlSimulationOptions(MaxSteps=maxsteps); experience = sim(env,[agentA,agentB,agentC],simOpts);

The agents are able to achieve full coverage of the grid world.
Restore the random number stream using the information stored in previousRngState.
rng(previousRngState);
Local Functions
The sim function calls the reset function at the start of each simulation episode, and the train function calls it at the start of each training episode. The reset function takes as input, and returns as output, a Simulink.SimulationInput (Simulink) object. The output object specifies temporary changes applied to model, which are then discarded when the simulation or training completes. For this example, the function resetMap uses the setVariable (Simulink) function to set variables in the model workspace. For more information, see Reset Function for Simulink Environments.
function in = resetMap(in,obsMat) % Reset function for multi agent area coverage example gridSize = [12 12]; isvalid = false; while ~isvalid rows = randperm(gridSize(1),3); cols = randperm(gridSize(2),3); s0 = [rows' cols']; if all(~all(s0(1,:) == obsMat,2)) && ... all(~all(s0(2,:) == obsMat,2)) && ... all(~all(s0(3,:) == obsMat,2)) isvalid = true; end end % initial grid g0 = zeros(12,12); % obstacle cells for idx = 1:size(obsMat,1) r = obsMat(idx,1); c = obsMat(idx,2); g0(r,c) = 1.0; end % robot cells g0(s0(1,1),s0(1,2)) = 0.25; g0(s0(2,1),s0(2,2)) = 0.50; g0(s0(3,1),s0(3,2)) = 0.75; in = setVariable(in, 's0', s0); in = setVariable(in, 'g0', g0); end