自動車レーダー
radarDataGenerator を使用して、マルチパス効果を含む確率的なレーダー検出、クラスターおよびトラックを生成します。radarTransceiver を使用して、レーダー ハードウェアをモデル化し、アンテナ パターン、送信される FMCW 波形および MFSK 波形、信号およびデータ処理チェーンを指定します。歩行者や自転車運転者のマイクロドップラー シグネチャをシミュレーションします。レーダーによって検出されたオブジェクトを分類するためにニューラル ネットワークに学習させます (Deep Learning Toolbox™)。
注目の例
Grid-Based Tracking in Urban Environments Using Multiple Radars
Track moving objects with multiple high-resolution radars using a grid-based tracker to enable fusion of data from high-resolution sensors such as radars and lidars.

Simulate an Automotive 4D Imaging MIMO Radar
Simulate a 4-D imaging MIMO radar for automotive applications using a
radarTransceiver.

Simulate and Mitigate FMCW Interference Between Automotive Radars
Simulate missed and ghost detections caused by interference between two FMCW automotive radars in a highway scenario.
Design and Simulate an FMCW Long-Range Radar (LRR)
Create a radarDataGenerator object from a radar design exported
from the Radar Designer app.

Simulate Radar Ghosts Due to Multipath Return
Simulate ghost target detections and tracks due to multipath reflections with both a statistical radar model and a transceiver model that generates I/Q signals.
Highway Vehicle Tracking with Multipath Radar Reflections
Demonstrate the challenges associated with tracking vehicles on a highway in the presence of multipath radar reflections.

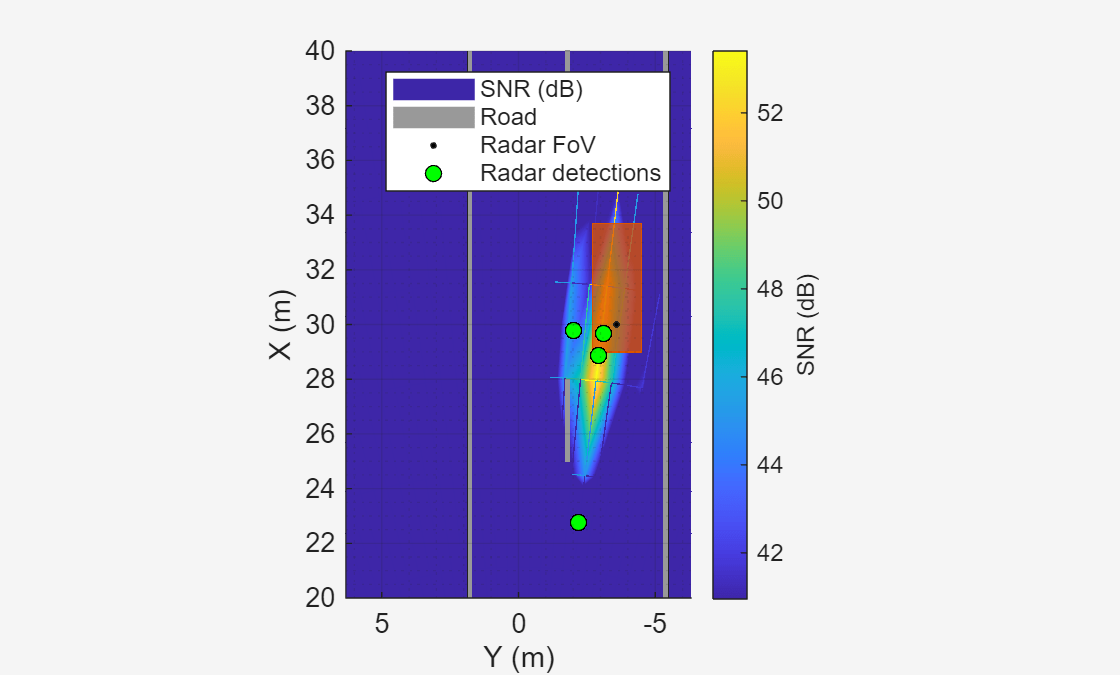
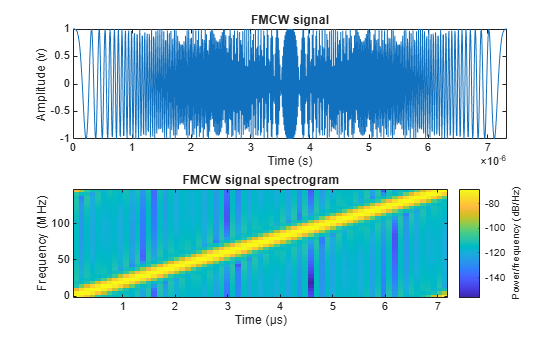
Radar Signal Simulation and Processing for Automated Driving
Model the hardware, signal processing, and propagation environment of an automotive radar.

Track-to-Track Fusion for Automotive Safety Applications
Fuse tracks from two vehicles to estimate of the environment.

Pedestrian and Bicyclist Classification Using Deep Learning
Classify pedestrians and bicyclists based on their micro-Doppler characteristics using deep learning and time-frequency analysis.

Track-to-Track Fusion for Automotive Safety Applications in Simulink
Fuse tracks from two vehicles to estimate of the environment in Simulink®.
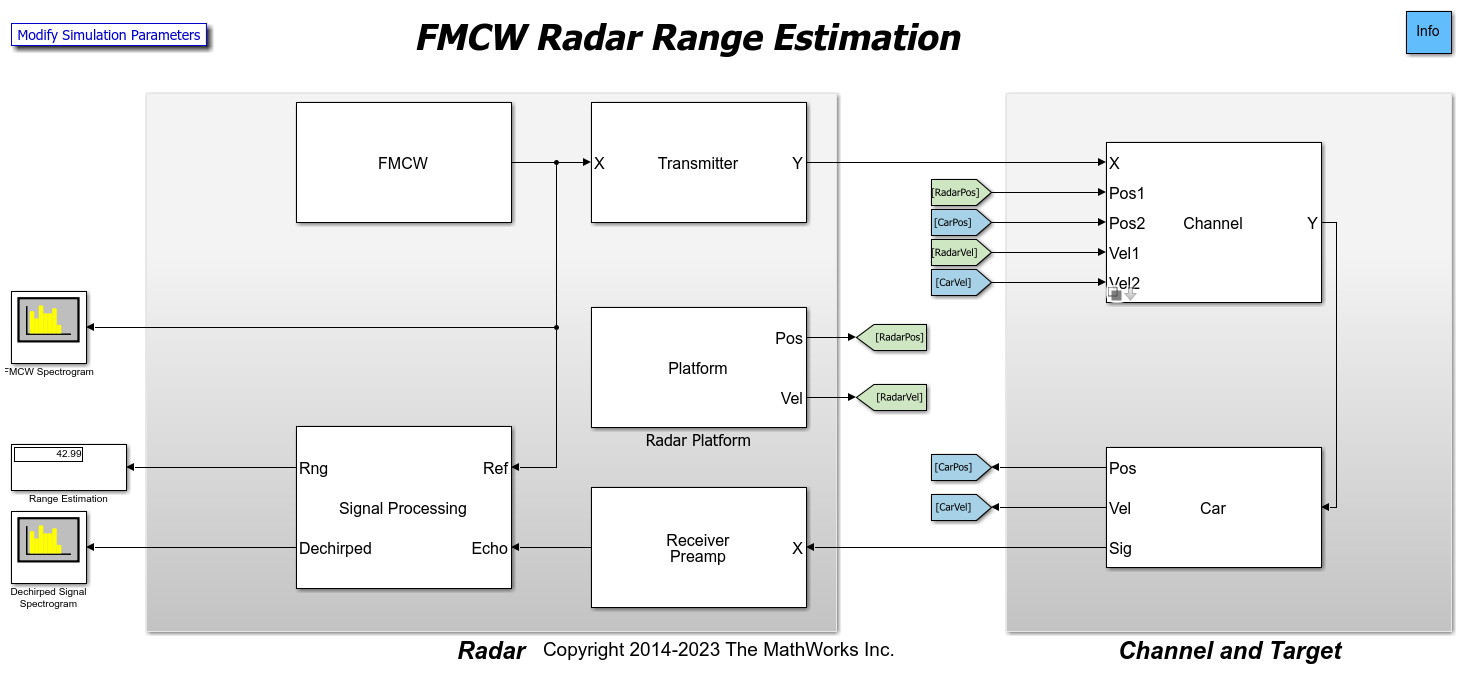
Automotive Adaptive Cruise Control Using FMCW Technology
Model an automotive adaptive cruise control system using frequency modulated continuous wave techniques.
Automotive Adaptive Cruise Control Using FMCW and MFSK Technology
Model an automotive radar in Simulink that includes adaptive cruise control.

Increasing Angular Resolution with Virtual Arrays
Form virtual arrays in MIMO radars to increase angular resolution.
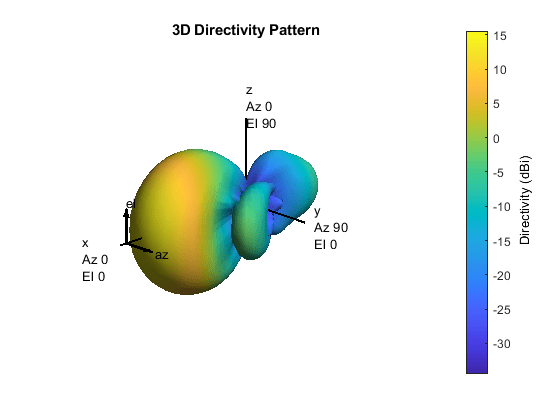
Patch Antenna Array for FMCW Radar
Model a 77 GHz 2x4 antenna array for Frequency-Modulated Continuous-Wave (FMCW) radar applications.
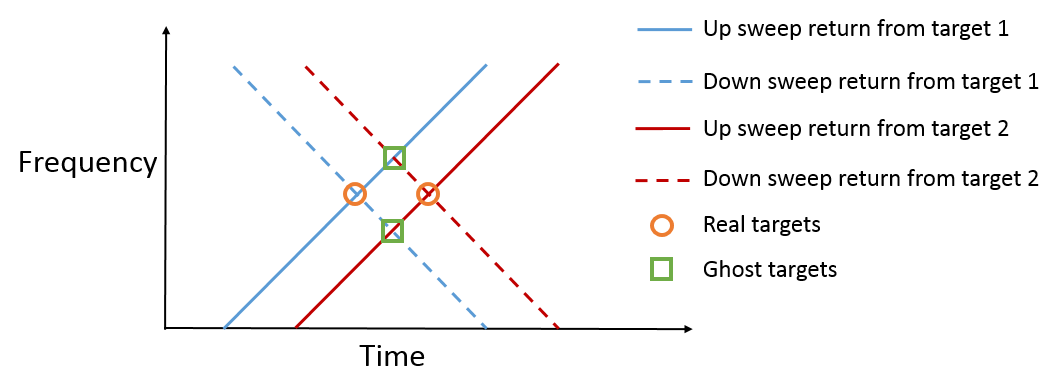
Simultaneous Range and Speed Estimation Using MFSK Waveform
Compare triangle sweep frequency-modulated continuous (FMCW) and multiple frequency-shift keying (MFSK) waveforms.
Extended Target Tracking with Multipath Radar Reflections in Simulink
Model and mitigate multipath radar reflections in a highway driving scenario in Simulink similarly to the Highway Vehicle Tracking with Multipath Radar Reflections MATLAB® example.