phitheta2azel
phi/theta 形式から方位角/仰角形式への角度の変換
説明
例
入力引数
出力引数
詳細
ベクトルの "方位角" は、x 軸と xy 平面へのベクトルの直交投影との間の角度です。角度は x 軸から y 軸に向かう方向が正です。方位角は -180 ~ 180 度の範囲内です。"仰角" は、ベクトルと xy 平面へのその直交投影との間の角度です。角度は xy 平面から正の z 軸に向かうときに正になります。既定では、素子またはアレイのボアサイト方向は正の x 軸に揃えられます。ボアサイト方向は、素子またはアレイのメイン ローブの方向です。
メモ
仰角を、ベクトルが正の z 軸に対して作る角度として定義している文献もあります。MATLAB® および Phased Array System Toolbox™ 製品では、この定義は使用されません。
次の図は、緑の実線で示されたベクトルの方位角と仰角を示しています。

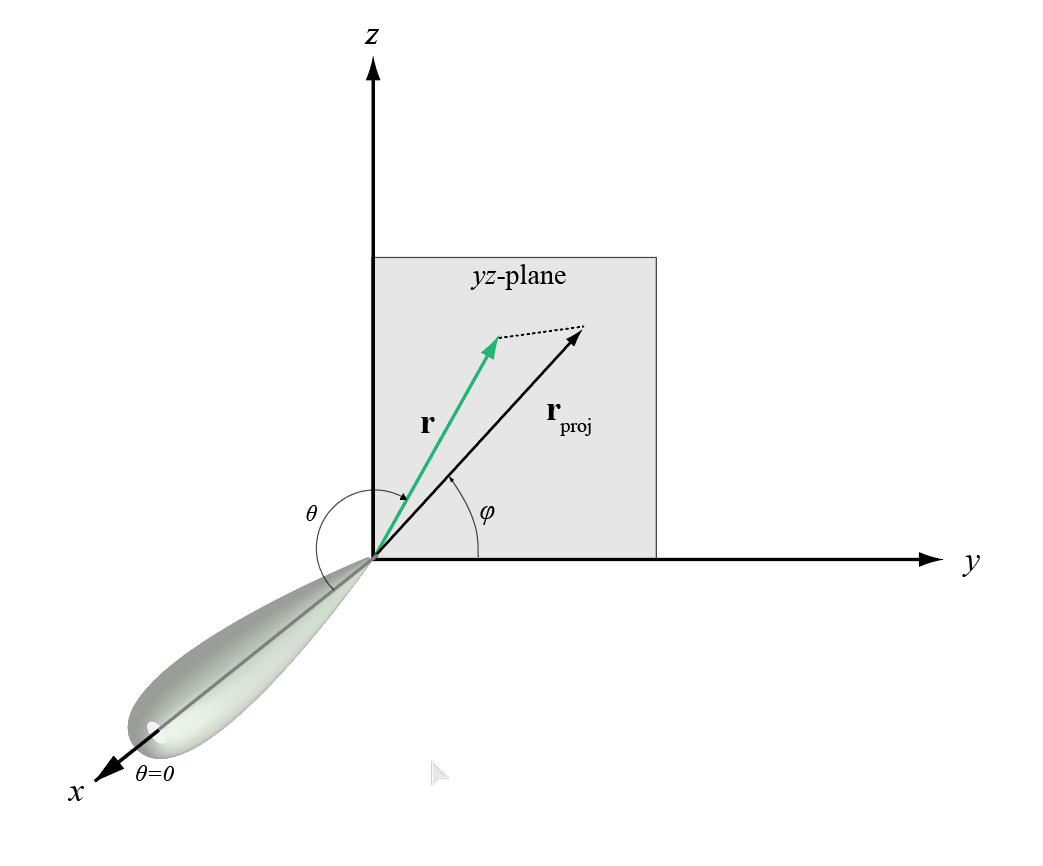
phi 角度 (φ) は、正の y 軸から、yz 平面へのベクトルの直交投影までの角度です。角度は正の z 軸に向かって正になります。phi 角度は 0 ~ 360 度になります。theta 角度 (θ) は、x 軸からベクトル自体までの角度です。角度は yz 平面に向かって正になります。theta 角度は 0 ~ 180 度になります。
次の図は、緑の実線で表示されるベクトルの phi と theta を示しています。
φ/θ と az/el との間の座標変換は、次の方程式で記述されます。
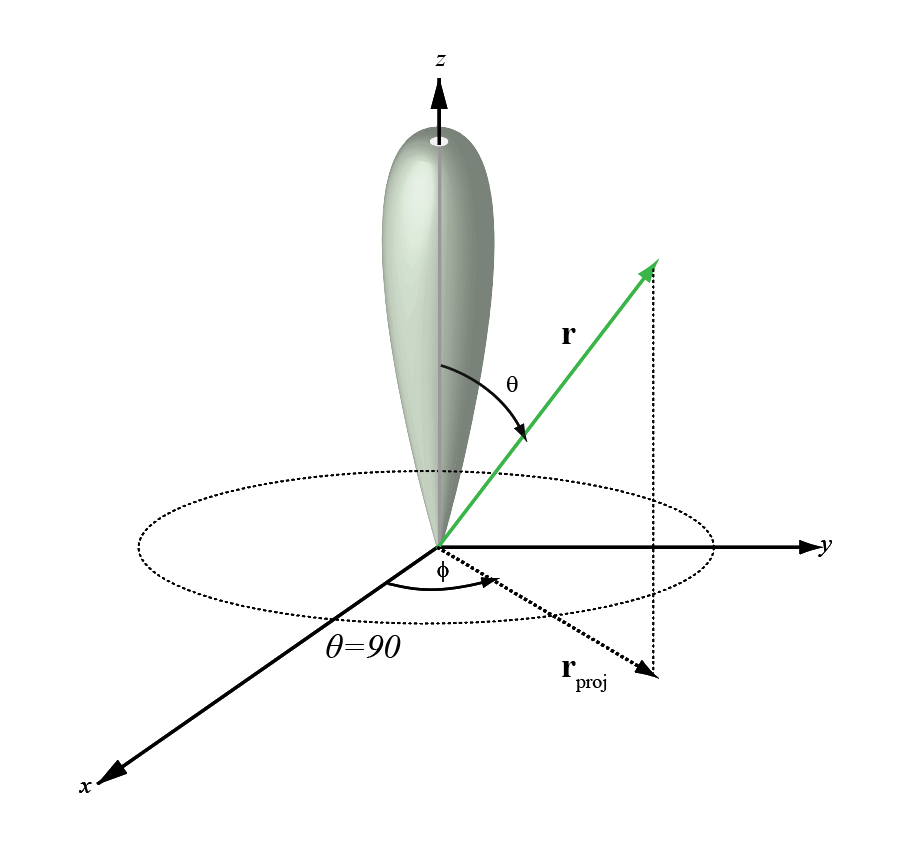
phi 角度 (φ) は、正の x 軸から、xy 平面へのベクトルの直交投影までの角度です。角度は正の y 軸に向かって正になります。phi 角度は 0 ~ 360 度になります。theta 角度 (θ) は、z 軸からベクトル自体までの角度です。角度は xy 平面に向かって正になります。theta 角度は 0 ~ 180 度になります。
次の図は、緑の実線で表示されるベクトルの φ と θ を示しています。
この変換は、RotAx が false である場合に適用されます。
拡張機能
バージョン履歴
R2012a で導入