step
Output responses of subarrays
Description
Note
The object performs an initialization the first time the object is executed. This
initialization locks nontunable properties
and input specifications, such as dimensions, complexity, and data type of the input data.
If you change a nontunable property or an input specification, the System object™ issues an error. To change nontunable properties or inputs, you must first
call the release method to unlock the object.
Examples
Calculate the response at boresight for two 2-element ULA arrays that form subarrays of a 4-element ULA array of short-dipole antenna elements.
Create a two-element ULA of short-dipole antenna elements. Then, arrange two copies to form a 4-element ULA.
antenna = phased.ShortDipoleAntennaElement; array = phased.ULA(Element=antenna,NumElements=2,ElementSpacing=0.5); replicatedarray = phased.ReplicatedSubarray(Subarray=array, ... Layout="Rectangular",GridSize=[1 2], ... GridSpacing="Auto");
Find the response of each subarray at boresight. Assume the operating frequency is 1 GHz and the wave propagation speed is the speed of light.
c = physconst("LightSpeed");
resp = replicatedarray(1.0e9,[0;0],c)resp = struct with fields:
H: [2×1 double]
V: [2×1 double]
Create an array consisting of three copies of a 4-element ULA having elements spaced 1/2 wavelength apart. The array operates at 300 MHz.
c = physconst("LightSpeed");
fc = 300e6;
lambda = c/fc;
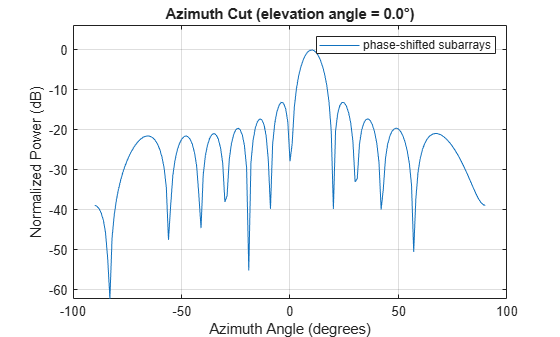
subarray = phased.ULA(4,0.5*lambda);Steer all subarrays by a common phase shift to 10° azimuth.
array = phased.ReplicatedSubarray(Subarray=subarray,GridSize=[1 3], ... SubarraySteering="Phase",PhaseShifterFrequency=fc); steer_ang = [10;0]; sv_array = phased.SteeringVector(SensorArray=array, ... PropagationSpeed=c); wts_array = sv_array(fc,steer_ang); pattern(array,fc,-90:90,0,CoordinateSystem="Rectangular", ... Type="powerdb",PropagationSpeed=c,Weights=wts_array, ... SteerAngle=steer_ang); legend("phase-shifted subarrays")
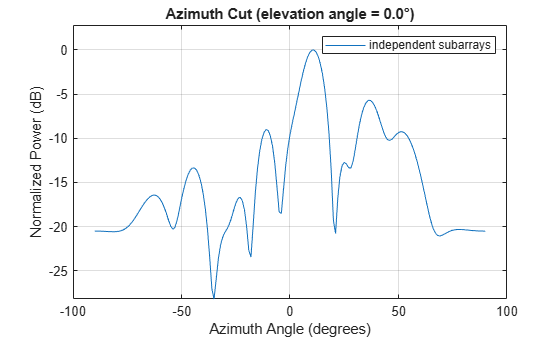
Compute independent subarray weights from subarray steering vectors. The weights point to 5°, 15°, and 30° azimuth. Set the SubarraySteering property to "Custom".
steer_ang_subarrays = [5 15 30;0 0 0]; sv_subarray = phased.SteeringVector(SensorArray=subarray, ... PropagationSpeed=c); wc = sv_subarray(fc,steer_ang_subarrays); array.SubarraySteering = "Custom"; pattern(array,fc,-90:90,0,CoordinateSystem="Rectangular", ... Type="powerdb",PropagationSpeed=c,Weights=wts_array, ... ElementWeight=conj(wc)); legend("independent subarrays") hold off
Input Arguments
Output Arguments
Version History
Introduced in R2012a