Pure Pursuit
線形と曲率の制御コマンド
ライブラリ:
Robotics System Toolbox /
Mobile Robot Algorithms
Navigation Toolbox /
Control Algorithms
説明
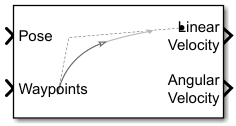
Pure Pursuit ブロックは、一連のウェイポイントおよび乗用車型ビークルまたは差動駆動型ビークルの現在の姿勢を使用して、パス追従のための線形速度と曲率のコマンドを計算します。このブロックは、更新された姿勢を使い、目的とする一連のウェイポイントに沿ったパスにビークルが従うよう線形速度と曲率のコマンドを更新します。[Max curvature] パラメーターと [目的の線形速度] パラメーターを使用して、ビークルのパフォーマンスに基づいてそれぞれ曲率と線形速度を更新します。
前方注視距離端子およびパラメーターは、ビークルにおける瞬時の局所的ゴールである、パス上の前方注視点を計算します。曲率コマンドはこの点に基づいて計算されます。前方注視距離を変更すると、アルゴリズムのパフォーマンスに大きく影響します。前方注視距離を大きくすると、ビークルの軌跡は滑らかになりますが、ビークルがパスに沿って近道をする可能性があります。前方注視距離が小さすぎると、パスを追跡する際に振動が発生し、動作が不安定になる可能性があります。単純追跡アルゴリズムの詳細については、単純追跡コントローラーを参照してください。
例

Path Following with Obstacle Avoidance in Simulink
Use Simulink® to avoid obstacles while following a path for a differential drive robot. This example uses ROS to send and receive information from a MATLAB-based simulator. You can replace the simulator with other ROS-based simulators such as Gazebo®.
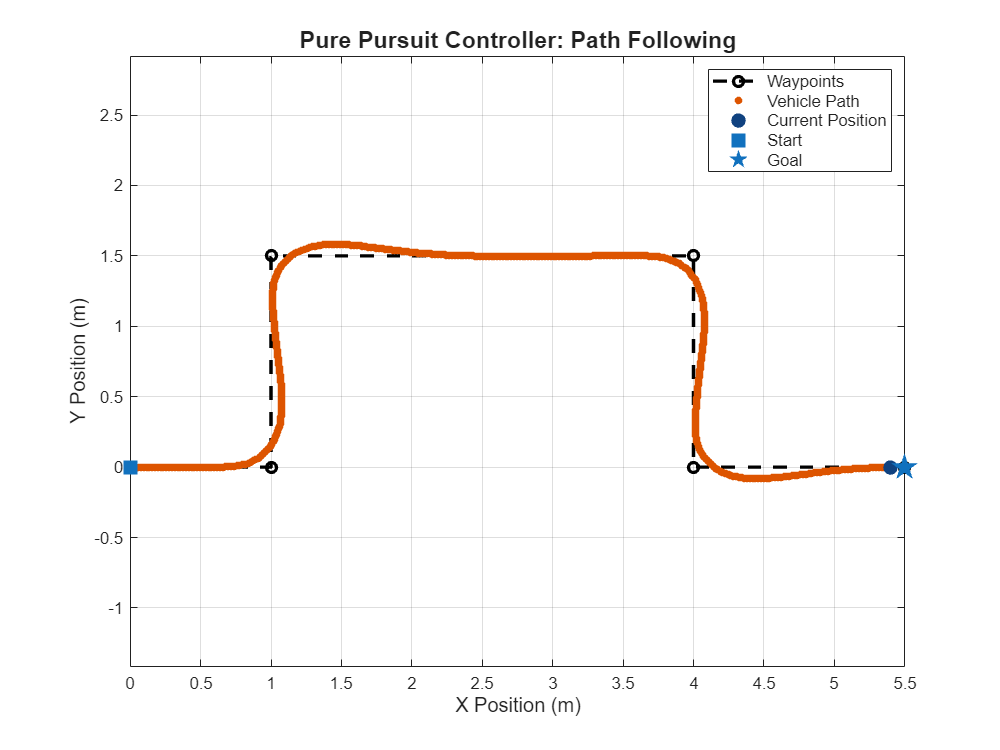
Follow Waypoints in Simulink Using Pure Pursuit Block
Guide a car-like vehicle along a series of waypoints in Simulink using the Pure Pursuit block.
端子
入力
出力
パラメーター
拡張機能
バージョン履歴
R2019b で導入参考
ブロック
クラス
トピック
- Simulink での差動駆動型ロボットのパスの計画 (Robotics System Toolbox)
- Path Following with Obstacle Avoidance in Simulink
- 単純追跡コントローラー