poseplot
構文
説明
poseplot 関数は、指定された 3 次元姿勢 (位置と向き) をパッチの原点に xyz 座標系があるパッチとしてプロットします。
poseplot は、姿勢を座標の原点位置にゼロ回転でプロットします。既定のナビゲーション座標系は北-東-下 (NED) 座標系です。
poseplot( は、指定された向きの姿勢をプロットします。既定では、位置は orientation)[0 0 0] です。
poseplot(___, は、姿勢プロットのナビゲーション座標系を指定します。 frame)
poseplot(___, は、1 つ以上の名前と値の引数を使用して pose patch プロパティを指定します。たとえば、Name=Value)poseplot(PatchFaceColor="r") は、赤の面の色で姿勢をプロットします。プロパティのリストについては、PosePatch Properties を参照してください。
poseplot( は、姿勢プロットの親座標軸を指定します。ax,___)
p = poseplot(___)PosePatch オブジェクトを返します。pose patch を作成した後でそのプロパティを変更する場合は p を使用します。プロパティのリストについては、PosePatch Properties を参照してください。
例
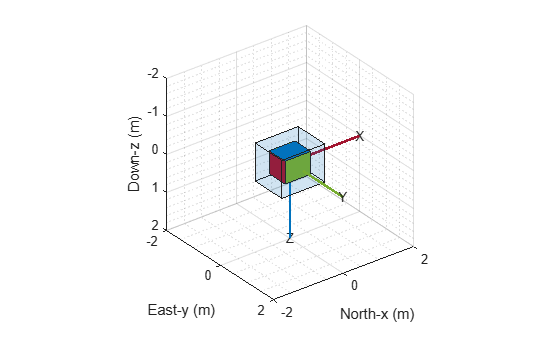
既定の設定で関数 poseplot を使用して、既定の姿勢をプロットします。
poseplot xlabel("North-x (m)") ylabel("East-y (m)") zlabel("Down-z (m)");
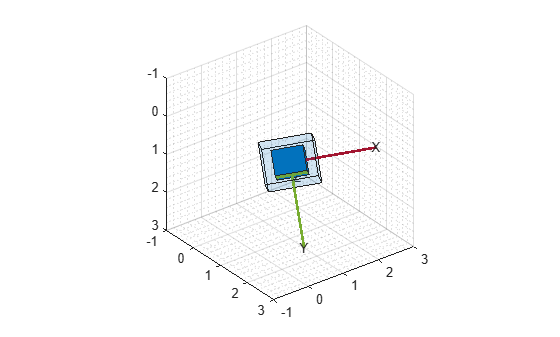
次に、指定した向きと位置の姿勢をプロットします。
q = quaternion([35 10 50],"eulerd","ZYX","frame"); position = [1 1 1]; poseplot(q,position)
その後、Figure 上に 2 番目の姿勢をプロットし、PosePatch オブジェクトを返します。2 番目の姿勢は、名前と値の引数 ScaleFactor を使用してサイズを小さくしてプロットします。
hold on
p = poseplot(eye(3),[5 5 5],ScaleFactor=0.5)p =
PosePatch with properties:
Orientation: [3×3 double]
Position: [5 5 5]
Show all properties
legend("First Pose","Second Pose") hold off

関数 poseplot を使用して、一連の姿勢をアニメーション化します。まず、初期位置と最終位置を定義します。
ps = [0 0 0]; pf = [10 0 0];
次に、quaternion オブジェクトを使用して初期の向きと最終の向きを定義します。
qs = quaternion([45,0,0],'eulerd','ZYX','frame'); qf = quaternion([-45,0,0],'eulerd','ZYX','frame');
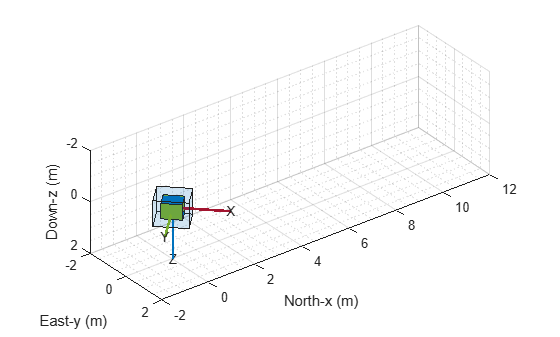
開始姿勢を表示します。
patch = poseplot(qs,ps); ylim([-2 2]) xlim([-2 12]) xlabel("North-x (m)") ylabel("East-y (m)") zlabel("Down-z (m)");
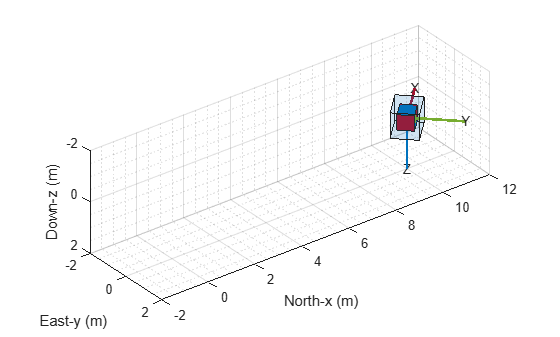
係数を使用して位置と向きを連続的に変更し、オブジェクト関数 set を使用して姿勢を更新します。
for coeff = 0:0.01:1 q = slerp(qs,qf,coeff); position = ps + (pf - ps)*coeff; set(patch,Orientation=q,Position=position); drawnow end
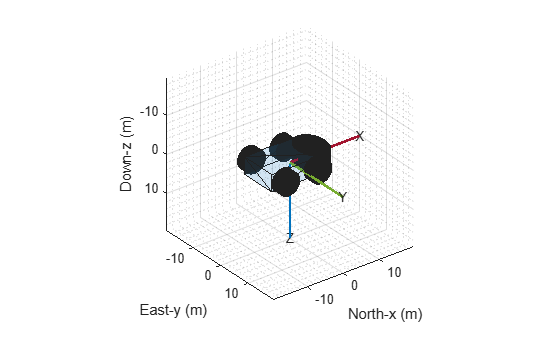
関数 poseplot を使用して、向きと位置をメッシュでプロットします。まず、地上ビークルを原点にゼロ回転でプロットします。
poseplot(ones("quaternion"),[0 0 0],MeshFileName="groundvehicle.stl",ScaleFactor=0.3); xlabel("North-x (m)") ylabel("East-y (m)") zlabel("Down-z (m)")
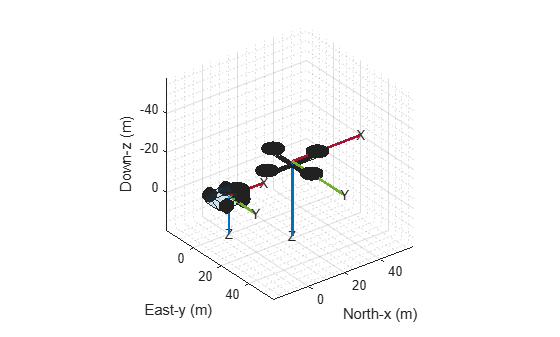
次に、回転子を位置 [20 20 -20] にゼロ回転でプロットします。
hold on poseplot(ones("quaternion"),[20 20 -20],MeshFileName="multirotor.stl",ScaleFactor=0.2);
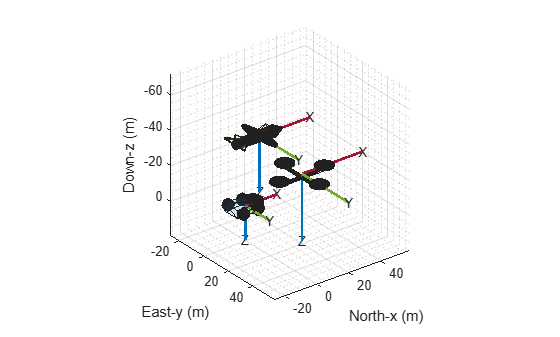
最後に、固定翼機を位置 [5 5 -40] にゼロ回転でプロットします。
poseplot(ones("quaternion"),[5 5 -40],MeshFileName="fixedwing.stl",ScaleFactor=0.4); view([-37.8 28.4]) hold off
入力引数
名前と値の引数
オプションの引数のペアを Name1=Value1,...,NameN=ValueN として指定します。ここで、Name は引数名で、Value は対応する値です。名前と値の引数は他の引数の後に指定しなければなりませんが、ペアの順序は重要ではありません。
例: poseplot(PatchFaceAlpha=0.1)
ここでは、PosePatch プロパティの一部だけを紹介しています。完全な一覧については、PosePatch Properties を参照してください。
姿勢プロットの向き。quaternion (Sensor Fusion and Tracking Toolbox) オブジェクトまたは回転行列として指定します。
姿勢プロットの位置。3 要素の実数値ベクトルとして指定します。
Standard Triangle Language (STL) メッシュ ファイルの名前。メッシュ ファイルの名前を含む string スカラーまたは文字ベクトルとして指定します。この引数を指定した場合、関数 poseplot は向きのボックスの代わりにメッシュをプロットします。
姿勢プロットのスケール係数。非負のスカラーとして指定します。スケール係数は、向きのボックスのサイズを制御します。MeshFileName 引数を指定した場合、スケール係数はメッシュのスケールも変更します。
パッチ面の色。RGB 3 成分、16 進数カラー コード、色名、または省略名として指定します。
RGB 3 成分は、色の赤、緑、青成分の強度値を指定する 3 要素の行ベクトルです。強度値は
[0, 1]の範囲でなければなりません。たとえば[0.4 0.6 0.7]のようになります。16 進数カラー コードは、ハッシュ記号 (
#) で始まり、3 桁または 6 桁の0からFまでの範囲の 16 進数が続く文字ベクトルまたは string スカラーです。これらの値では大文字小文字は区別されません。したがって、カラー コード"#FF8800"、"#ff8800"、"#F80"、および"#f80"は等価です。
次に、よく使用する色とそれに対応する値のリストを示します。
| 色名 | 省略名 | RGB 3 成分 | 16 進数カラー コード | 外観 |
|---|---|---|---|---|
"red" | "r" | [1 0 0] | "#FF0000" |
|
"green" | "g" | [0 1 0] | "#00FF00" |
|
"blue" | "b" | [0 0 1] | "#0000FF" |
|
"cyan" | "c" | [0 1 1] | "#00FFFF" |
|
"magenta" | "m" | [1 0 1] | "#FF00FF" |
|
"yellow" | "y" | [1 1 0] | "#FFFF00" |
|
"black" | "k" | [0 0 0] | "#000000" |
|
"white" | "w" | [1 1 1] | "#FFFFFF" |
|








パッチ面の透明度。範囲 [0, 1] のスカラーとして指定します。値 1 は完全に不透明で、値 0 は完全に透明です。
出力引数
バージョン履歴
R2021b で導入