read
Read data from GPS receiver
Syntax
Description
The read function performs a non-blocking read from the
GPS device and returns the data in either timetable or matrix format.
[
returns matrices of measurements from the GPS. This is a non blocking read which
returns N data points in matrix format, where
N is specified by lla,groundSpeed,course,dops,gpsReceiverTime,timestamp,overrun] = read(gps)SamplesPerRead
property and matrix is specified using
OutputFormat property of the gpsdev
object.
Examples
Read data from the GPS receiver connected to the host computer on a specific serial port.
Required Hardware
To run this example, you need:
UBlox Neo-6M GPS module
GPS antenna
USB to UART module
USB cable
Connecting wires
Hardware Connection
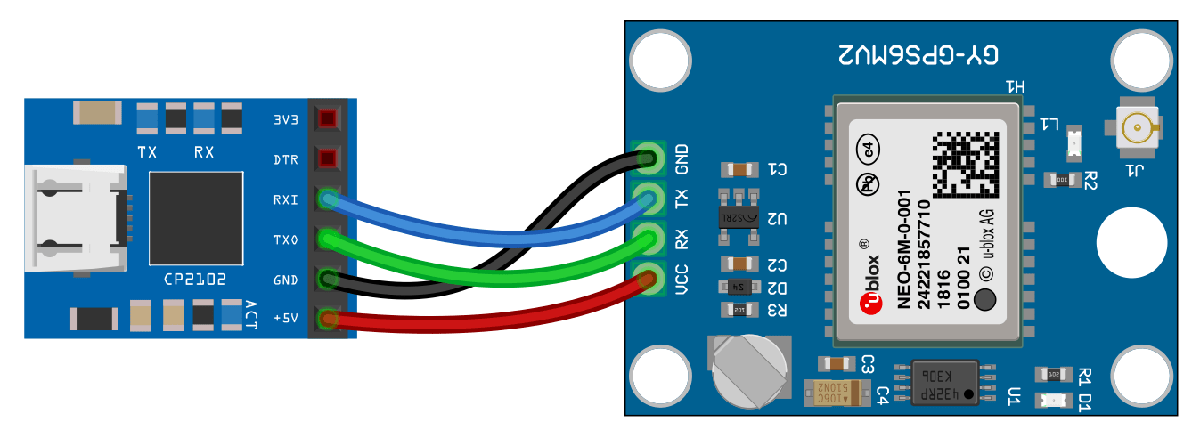
Connect the pins on the UBlox Neo-6M GPS module to the pins on your USB to UART module. The connections are:
VCC - +5V
RX - TXO
TX - RXI
GND - GND
Connect the GPS antenna to the GPS module. Connect the USB to UART module to the host computer with a USB cable. GPS Fix can be easily acquired in locations that have a clear view of the sky. Wait for the GPS module to acquire satellite signals (Fix). This can be verified by checking the Fix LED (D1) of your GPS module.
Create GPS Object
Create a gpsdev object for the GPS receiver connected to a specific port. Specify the output format of the data as a timetable.
gps = gpsdev('COM4','OutputFormat',"timetable")
gps =
gpsdev with properties:
SerialPort: COM4
BaudRate: 9600 (bits/s)
SamplesPerRead: 1
ReadMode: "latest"
SamplesRead: 0
Show all properties all functions
Read the GPS Data
Read the GPS data and return them as a timetable.
[tt,overruns] = read(gps)
tt=1×5 timetable
22-Mar-2021 15:31:15.190 17.4701,78.3434,449.6000 0.2562 NaN 9.3100,1.4800,9.1900 22-Mar-2021 10:01:14.000
overruns = 0
Display number of samples read and the samples available in the host buffer.
gps.SamplesRead
ans = 1
gps.SamplesAvailable
ans = 0
Release the GPS object to configure the non tunable properties. The release function also clears the buffer and resets the SamplesRead and SamplesAvailable properties.
release(gps)
Specify the number of samples per read to 2. Read the GPS data.
gps.SamplesPerRead = 2; read(gps)
ans=2×5 timetable
22-Mar-2021 15:31:17.178 17.4701,78.3434,450 0.0638 NaN 9.3200,1.4800,9.2000 22-Mar-2021 10:01:16.000
22-Mar-2021 15:31:17.178 17.4701,78.3434,450 0.0638 NaN 9.3200,1.4800,9.2000 22-Mar-2021 10:01:16.000
Display number of samples read and the samples available in the host buffer.
gps.SamplesRead
ans = 1
gps.SamplesAvailable
ans = 0
Clean Up
When the connection is no longer needed, clear the associated object.
delete(gps);
clear gps;Read data from the GPS receiver connected to the host computer using serialport object.
Required Hardware
To run this example, you need:
UBlox Neo-6M GPS module
GPS antenna
USB to UART module
USB cable
Connecting wires
Hardware Connection

Connect the pins on the UBlox Neo-6M GPS module to the pins on your USB to UART module. The connections are:
VCC - +5V
RX - TXO
TX - RXI
GND - GND
Connect the GPS antenna to the GPS module. Connect the USB to UART module to the host computer with a USB cable. GPS Fix can be easily acquired in locations that have a clear view of the sky. Wait for the GPS module to acquire satellite signals (Fix). This can be verified by checking the Fix LED (D1) of your GPS module.
Create GPS Object
Connect to the GPS receiver using serialport object. Specify the port name and the baud rate. Specify the output format of the data as matrix.
s = serialport('COM4',9600); gps = gpsdev(s,'OutputFormat',"matrix")
gps =
gpsdev with properties:
SerialPort: COM4
BaudRate: 9600 (bits/s)
SamplesPerRead: 1
ReadMode: "latest"
SamplesRead: 0
Show all properties all functions
Read the GPS Data
Read the GPS data and return them as matrices.
[lla,speed,course,dops,gpsReceiverTime,timestamp,overruns] = read(gps)
lla = 1×3
NaN NaN NaN
speed = NaN
course = NaN
dops = 1×3
NaN NaN NaN
gpsReceiverTime = datetime
NaT
timestamp = datetime
22-Mar-2021 03:41:00.274
overruns = 1
Display number of samples read and the samples available in the host buffer.
gps.SamplesRead
ans = 1
gps.SamplesAvailable
ans = 0
Flush all GPS data accumulated in the buffers and reset the SamplesRead and SamplesAvailable properties.
flush(gps)
Display number of samples read and the samples available in the host buffer.
gps.SamplesRead
ans = 0
gps.SamplesAvailable
ans = 0
Clean Up
When the connection is no longer needed, clear the associated object.
delete(gps); clear gps; clear s;
Input Arguments
Output Arguments
More About
Version History
Introduced in R2020b