非線形特性評価
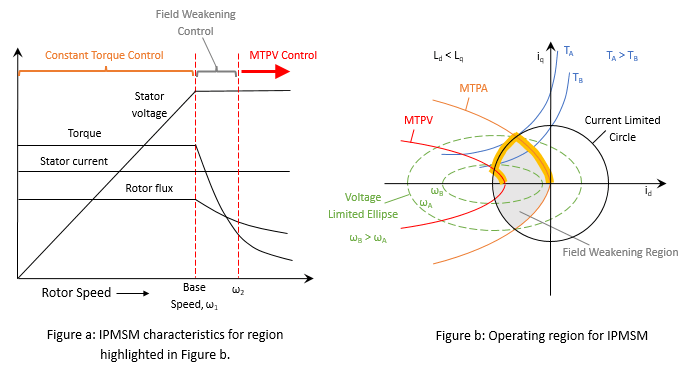
Motor Control Blockset™ を使用すると、磁気飽和、インバーターのデッド タイム、軸間のクロスカップリングなど、理想的な線形仮定から逸脱するモーター挙動を特定およびモデル化できます。これらの影響により、インダクタンス、トルク定数、鎖交磁束などのモーター パラメーターは、電流、速度、および操作点に応じて変化します。基本的な制御設計で使用される線形モデルでは、これらの変動を全動作範囲にわたって正確に表現することはできません。したがって、非線形特性評価は、実環境におけるモーターの実際の挙動をより現実的に記述します。
非線形性を考慮しない場合、コントローラーはトルク誤差、効率低下、低速性能の悪化、または高電流時の不安定性に直面する可能性があります。ルックアップ テーブル (LUT) は、非線形モーター制御において一般的に使用され、鎖交磁束やインダクタンスなどの実験的に測定または同定されたモーター パラメーターを、速度や電流の関数として保存し、さらに最適な指令電流などの計算値も格納します。動作中、コントローラーは LUT にアクセスして非線形挙動をリアルタイムで補償し、純粋な線形制御手法と比較して、より高精度なトルク制御、効率向上、およびロバストな性能を実現します。
関数
mcb.generateMotorLUT | Generate lookup tables for motor parameters (R2022b 以降) |
mcb.PMSMMaxSpeed | Calculate maximum speed of PMSM (R2022b 以降) |
mcb.PMSMRatedTorque | Calculate rated torque of PMSM (R2022b 以降) |
mcb.PMSMSpeeds | Calculate milestone speeds of PMSM (R2022b 以降) |
mcb.calcPMSMVdVq | Calculate d and q axis voltages from PMSM parameters, operating currents, and electric speed (R2022b 以降) |
mcb.updatePMSMLdLqFluxPM | Update PMSM inductance and flux parameters (R2022b 以降) |
ブロック
トピック
- Determine Nonlinear Behavior of PMSM Using Characterization Test Data
Build realistic closed-loop simulation of PMSM using characterization test data and obtain nonlinear operating characteristics.
注目の例
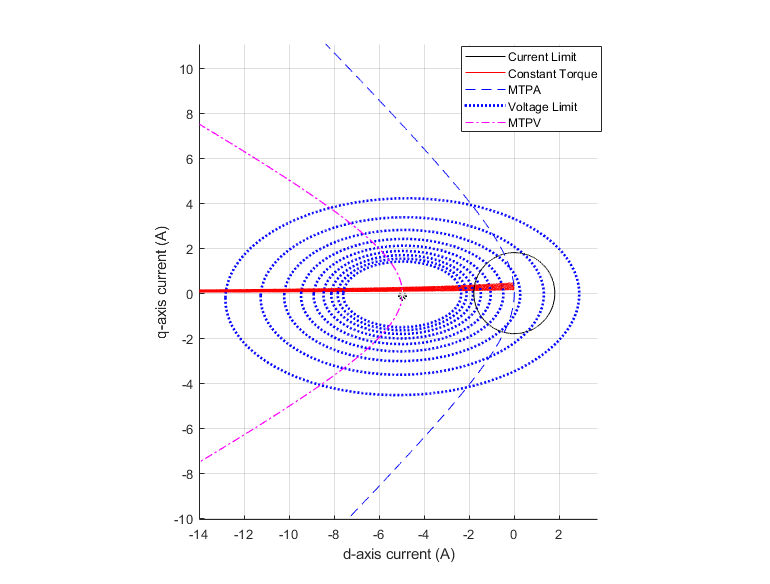
PMSM Drive Characteristics and Constraint Curves
Uses Motor Control Blockset™ to show how to use the PMSM characteristic plotting and PMSM milestone speed identification functions to obtain a control trajectory.
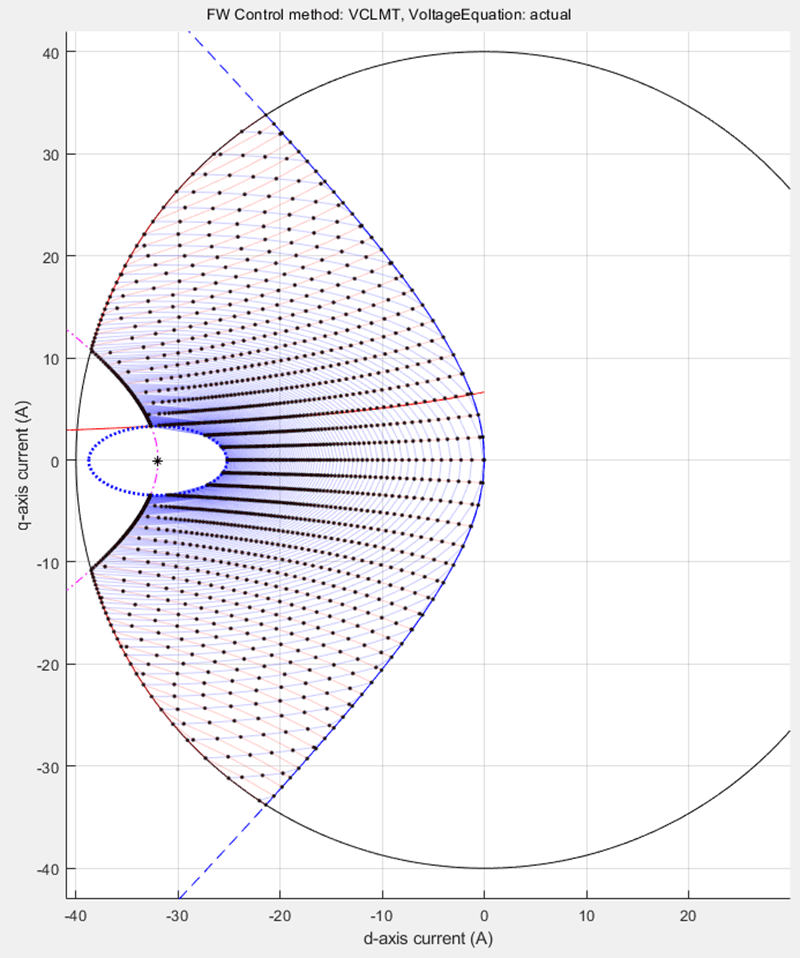
PMSM Constraint Curves and Their Application
Uses Motor Control Blockset™ to explain the fundamentals of constraint curves, utilization of these curves to determine operating currents, and usage of the grid of these currents in simulation or deployment environments.
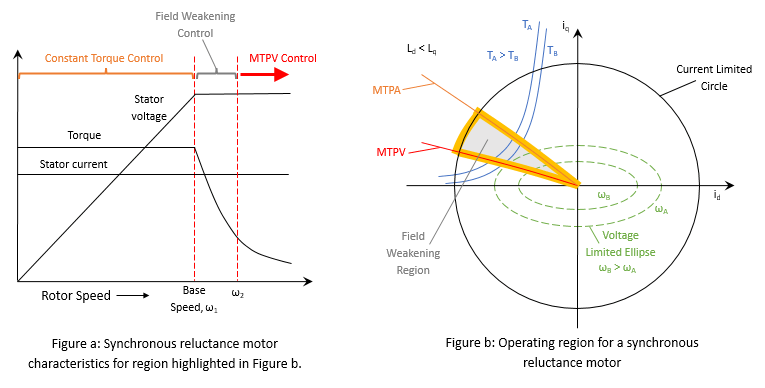
SynRM Constraint Curves and Their Application
Uses Motor Control Blockset™ to utilize the motor constraint curves to determine the operating currents and use lookup tables of these currents in simulation or deployment environments. The example uses the PMSM constraint curves described in the PMSM Drive Characteristics and Constraint Curves page.
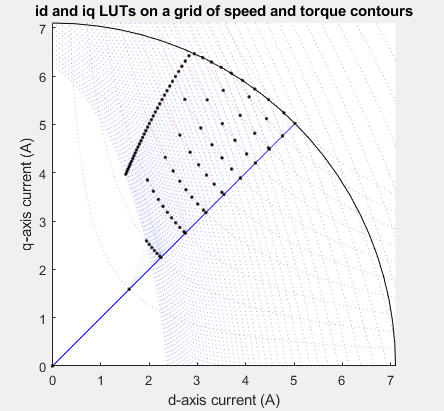
Field-Weakening Control (with MTPA) of Nonlinear PMSM Using Lookup Table
Uses a lookup table (LUT) for a nonlinear permanent magnet synchronous motor (PMSM) and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity PMSM in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.
Field-Weakening Control (with MTPA) of Nonlinear Synchronous Reluctance Motors Using Lookup Table
Uses a lookup table (LUT) for a nonlinear synchronous reluctance motor and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity synchronous reluctance motor in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.