nearest
半径内の最近傍
説明
例
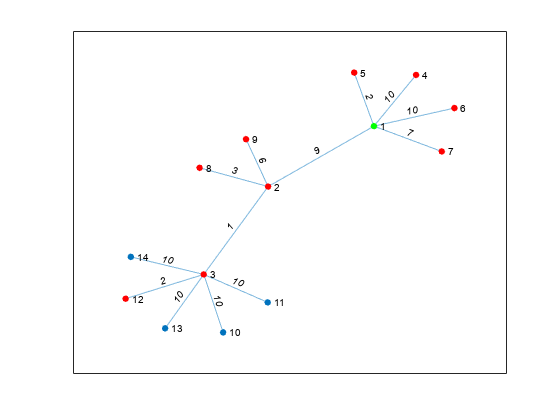
重み付きエッジをもつグラフを作成し、プロットします。
s = [1 1 1 1 1 2 2 2 3 3 3 3 3]; t = [2 4 5 6 7 3 8 9 10 11 12 13 14]; weights = randi([1 10],1,13); G = graph(s,t,weights); p = plot(G,'Layout','force','EdgeLabel',G.Edges.Weight);

ノード 1 から半径 15 以内にどのノードがあるかを判定します。
nn = nearest(G,1,15)
nn = 9×1
5
7
2
3
4
6
8
12
9
ソース ノードを緑、最近傍を赤で強調表示します。
highlight(p,1,'NodeColor','g') highlight(p,nn,'NodeColor','r')
重み付きエッジをもつグラフを作成し、プロットします。
s = [1 1 1 2 2 6 6 7 7 3 3 9 9 4 4 11 11 8];
t = [2 3 4 5 6 7 8 5 8 9 10 5 10 11 12 10 12 12];
weights = [10 10 10 10 10 1 1 1 1 1 1 1 1 1 1 1 1 1];
G = graph(s,t,weights);
plot(G,'EdgeLabel',G.Edges.Weight)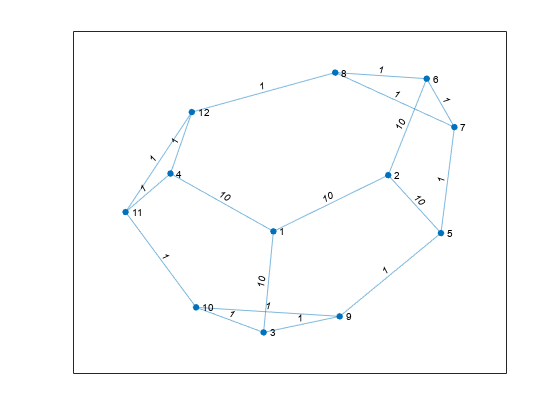
ノード 3 から半径 5 以内にどのノードがあるかを判定し、各ノードまでの距離を返します。
[nn,dist] = nearest(G,3,5)
nn = 9×1
9
10
5
11
4
7
12
6
8
dist = 9×1
1
1
2
2
3
3
3
4
4
重み付きエッジをもつ有向グラフを作成し、プロットします。
s = {'a' 'a' 'a' 'b' 'c' 'c' 'e' 'f' 'f'};
t = {'b' 'c' 'd' 'a' 'a' 'd' 'f' 'a' 'b'};
weights = [1 1 1 2 2 2 2 2 2];
G = digraph(s,t,weights);
plot(G,'EdgeLabel',G.Edges.Weight)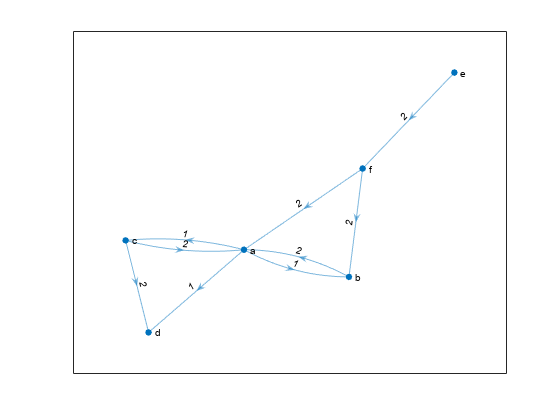
ノード 'a' から出方向の経路の距離で測定した場合に、ノード 'a' から半径 1 以内にある最も近いノードを判定します。
nn_out = nearest(G,'a',1)nn_out = 3×1 cell
{'b'}
{'c'}
{'d'}
半径を Inf に指定して、ノード 'a' に至る入方向の経路をもつすべてのノードを判定します。
nn_in = nearest(G,'a',Inf,'Direction','incoming')
nn_in = 4×1 cell
{'b'}
{'c'}
{'f'}
{'e'}
入力引数
名前と値の引数
出力引数
拡張機能
バージョン履歴
R2016a で導入
参考
shortestpath | distances | shortestpathtree | neighbors | successors | predecessors