detect
Syntax
Description
Add-On Required: This feature requires the Lidar Toolbox Interface for OpenPCDet Library add-on.
bboxes = detect(detector,ptCloud)ptCloud, using a voxel
region-based convolutional neural network (Voxel R-CNN) object detector,
detector. The function returns the locations of detected objects as
a set of bounding boxes.
To use this function, your system must have a CUDA® enabled NVIDIA® GPU. For information on the supported compute capabilities, see GPU Computing Requirements (Parallel Computing Toolbox).
detectionResults = detect(detector,ds)ds.
[___] = detect(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, Name=Value)Threshold=0.7 specifies
a detection threshold of 0.7.
Examples
Create a Voxel R-CNN object detector.
detector = voxelRCNNObjectDetector;
Read the input point cloud.
filename = "PandasetLidarData.pcd";
ptCloud = pcread(filename);Run the pretrained Voxel R-CNN object detector on the input point cloud.
[bboxes,scores,labels] = detect(detector,ptCloud);
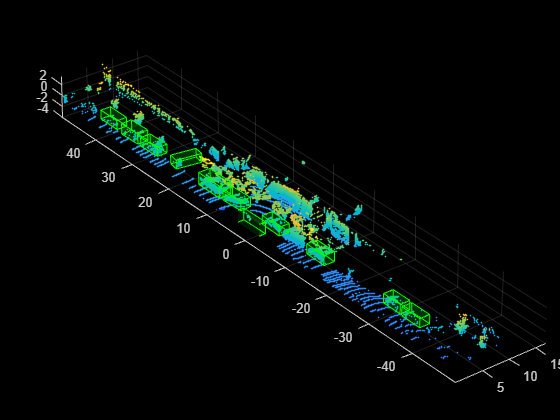
Display the detected bounding boxes. For better visualization, select a region of interest, roi, from the point cloud data.
roi = [0.0 89.12 -49.68 49.68 -5.0 5.0]; indices = findPointsInROI(ptCloud,roi); figure ax = pcshow(select(ptCloud,indices).Location); zoom(ax,1.5) showShape("cuboid",bboxes,Parent=ax,Color="green",Opacity=0.1,LineWidth=0.5);
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2024b