fanbeam
ファンビーム変換
説明
F = fanbeam(I,D,Name=Value)
[ はファンビーム センサーの位置を F,fanSensorPos,fanRotAngles] = fanbeam(___)fanSensorPos で、ファンビーム投影を計算する回転角を fanRotAngles で返します。
例
座標軸を表示するように IPT 基本設定を指定します。
iptsetpref('ImshowAxesVisible','on')
サンプル イメージを作成して表示します。
ph = phantom(128); imshow(ph)
ファンビーム投影を計算して表示します。
[F,Fpos,Fangles] = fanbeam(ph,250); figure imshow(F,[],'XData',Fangles,'YData',Fpos,... 'InitialMagnification','fit') axis normal xlabel('Rotation Angles (degrees)') ylabel('Sensor Positions (degrees)') colormap(gca,hot), colorbar

'arc' の幾何配置に対するファンビーム投影を計算します。
I = ones(100); D = 200; dtheta = 45; [Farc,FposArcDeg,Fangles] = fanbeam(I,D,... 'FanSensorGeometry','arc',... 'FanRotationIncrement',dtheta);
角度位置を x´ 軸方向の線形距離に変換します。
FposArc = D*tan(FposArcDeg*pi/180);
'line' の幾何配置に対するファンビーム投影を計算します。
[Fline,FposLine] = fanbeam(I,D,... 'FanSensorGeometry','line',... 'FanRotationIncrement',dtheta);
対応するラドン変換を計算します。
[R,Rpos]=radon(I,Fangles);
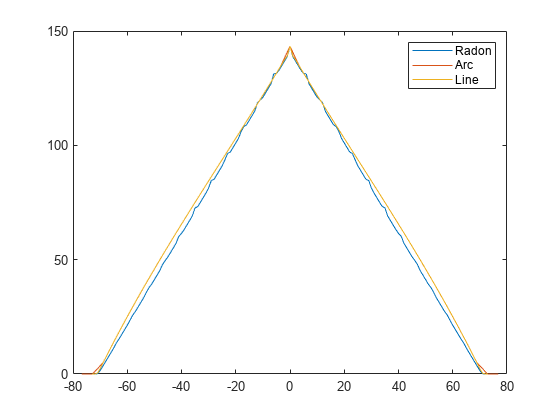
特定の回転角で 3 つの投影を表示します。この 3 つは非常によく似ています。異なっているのは、サンプリングの幾何配置と計算に使用された数値近似があるからです。
figure idx = find(Fangles==45); plot(Rpos,R(:,idx),... FposArc,Farc(:,idx),... FposLine,Fline(:,idx)) legend('Radon','Arc','Line')
入力引数

名前と値の引数
オプションの引数のペアを Name1=Value1,...,NameN=ValueN として指定します。ここで、Name は引数名で、Value は対応する値です。名前と値の引数は他の引数の後に指定しなければなりませんが、ペアの順序は重要ではありません。
例: fanbeam(I,D,FanRotationIncrement=5) は、5 度刻みの回転角度でファンビーム投影を計算します。
R2021a より前では、コンマを使用して名前と値をそれぞれ区切り、Name を引用符で囲みます。
例: fanbeam(I,D,"FanRotationIncrement",5)
ファンビーム回転角の増分 (度単位)。正のスカラーとして指定します。

データ型: double
ファンビーム センサーの配置。"arc" または "line" として指定します。
値 | 意味 | 図 |
|---|---|---|
| センサーは、円弧状に等角度で配置されます。弧の中心はファンビーム頂点です。
|
|
| センサーは、x' 軸に平行なラインに沿って等間隔に配置されます。最も近いセンサーは回転中心から距離
|
|


出力引数
ヒント
ガイドラインとして、D を以下のように計算されるイメージの対角線寸法の 1/2 より数ピクセルだけ大きくしてください。
sqrt(size(I,1)^2 + size(I,2)^2)
F で返される値はファンビーム投影の数値的近似です。アルゴリズムはラドン変換に依存し、これはファンビーム形状に内挿されます。結果は使用されるパラメーターに応じて異なります。イメージが大きい場合、D が大きい場合、および点がエッジから離れてイメージの中心に近い場合には、結果の精度が高くなります。
参照
[1] . pp. 92-93.
バージョン履歴
R2006a より前に導入